Does local position estimator takes any information from mc_pos_control?
LPE - position estimator;
mc_pos_control - position controller.
the feedback comes from the sensors and states.
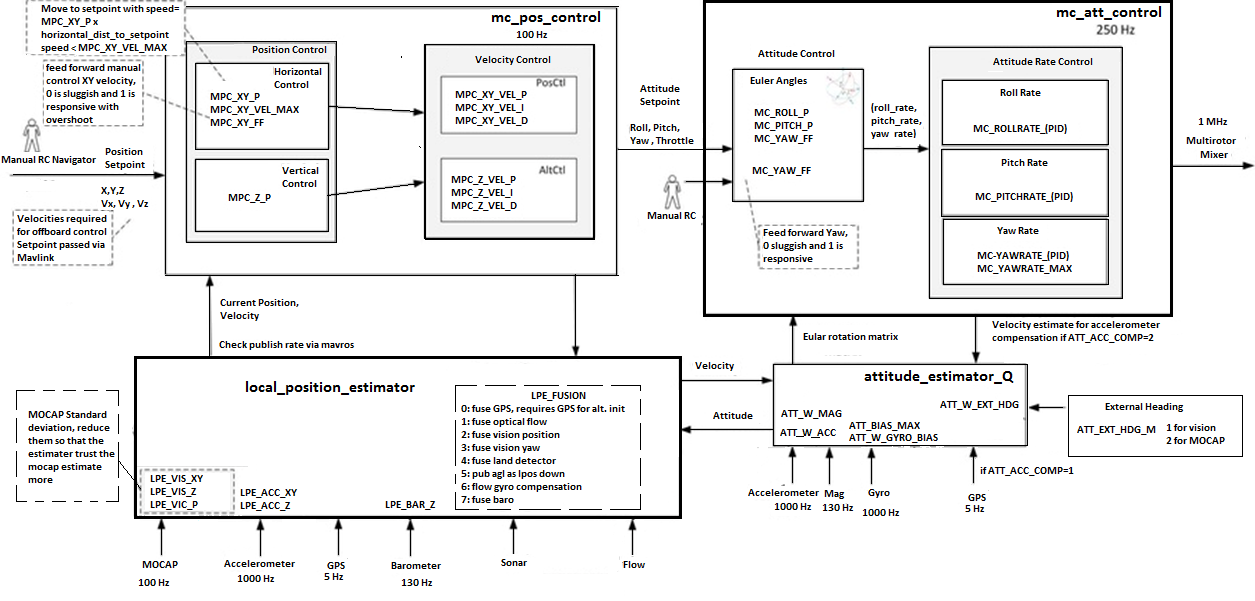
There was a diagram somewhere with another position estimator, INAV, but I wanted to draw the diagram of controller and LPE position estimator. Everything makes sense, except a few things. First if you look at this diagram , the question is LPE gives velocity and position estimates to controllers right?
I cannot seem to understand the other arrow from LPE towards controller. Apart from that, I wanted to extend my understanding of LPE, what I understand is that it is an extended kalman filter, so if I am using MOCAP only and not fusing anything , then MOCAP will be my measurement and the predictor will be only based on accelerometer.
Please kindly correct me if there is anything incorrect in my understanding or in this diagram. Also is there a way to know the frequency of communication between LPE and controller and vice versa?
hello ,can you tell me where you get this diagram,thanks.
I found it via google image search. The webpage was in chinese. I could not understand it.
ok, I’m chinese, ,
let me find that page again and share it.
OK,thank you very much
Hi, I am sorry, I could not find the exact page, but here is the link
OK,thank you very much