Hello all,
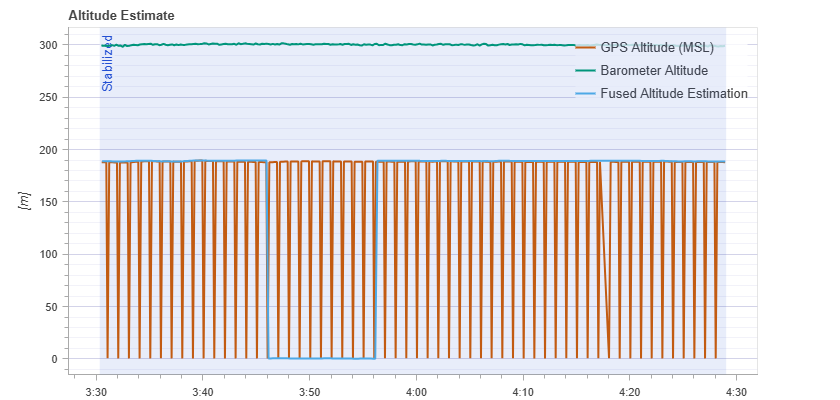
I have flown a drone with exact same profile as below.
The drone is equipped with down looking radar NRA24 and it publish distance data at about 50Hz.
Both drone flew with same PX4 fw v1.14 and parameters.
- EKF2_HGT_REF: 1
- EKF2_RNG_A_HMAX: 10
- EKF2_RNG_A_IGATE: 1
- EKF2_RNG_A_VMAX: 1
- EKF2_RNG_CTRL: 1
- EKF2_RNG_DELAY: 5
- EKF2_RNG_GATE: 5
- EKF2_RNG_K_GATE: 5
- EKF2_RNG_NOISE: 0.1
- EKF2_RNG_PITCH: 0
- EKF2_RNG_QLTY_T: 1
- EKF2_RNG_SFE: 0.05
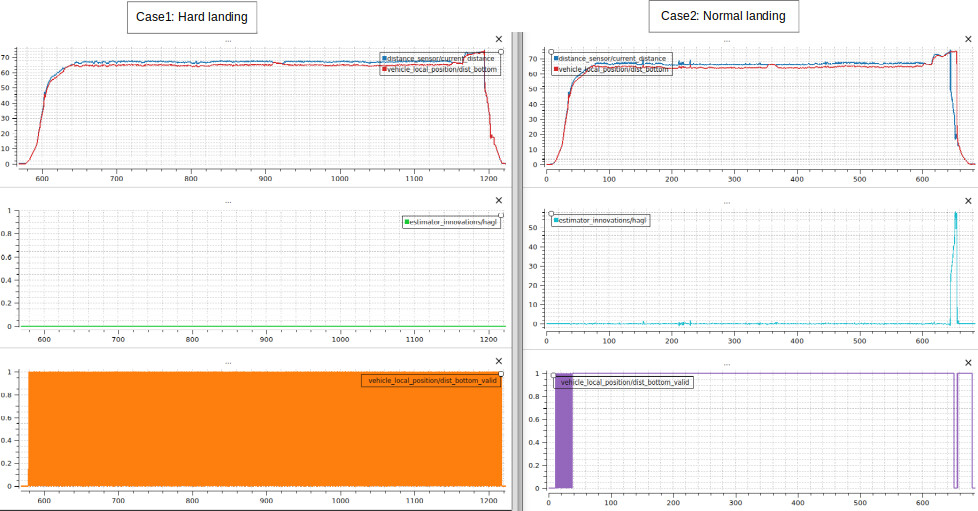
Both flew OK during the most of the flight however when the drone was in the landing phase, CASE 1 almost crash landed as shown below.
- CASE1: Rapid descend and impact the ground.
- CASE2: Gradually reduce vertical speed until land.
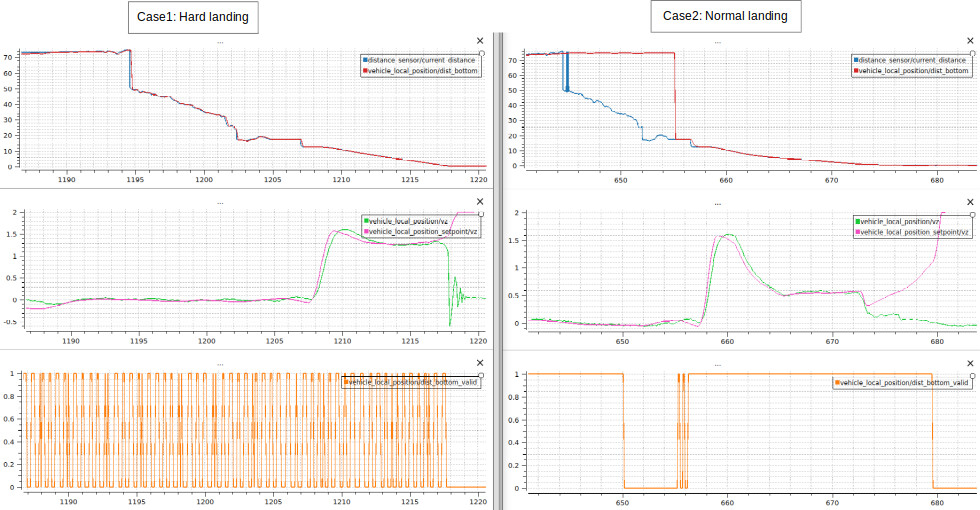
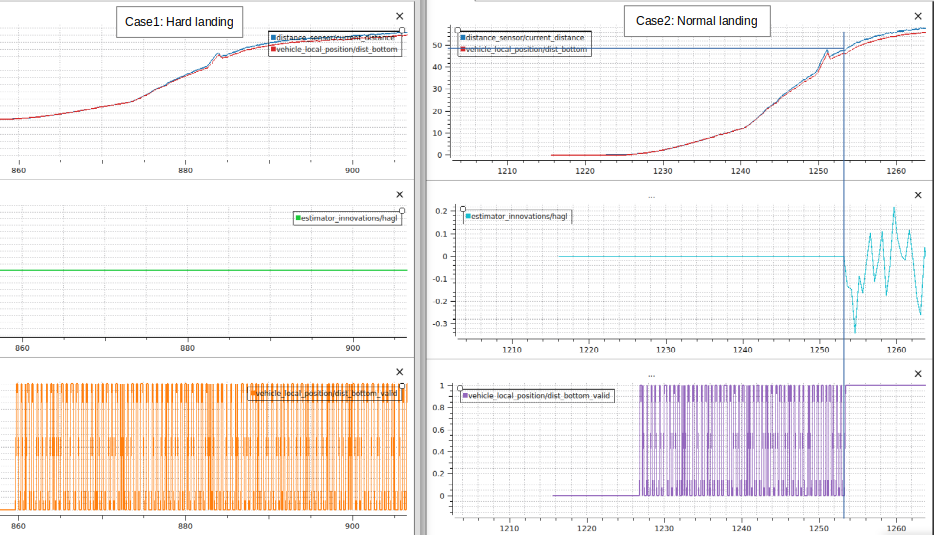
When looking at the local_position/dist_bottom_valid data, we found significant difference as CASE1 is continuously toggling it while CASE2 didn’t.
CASE2 also toggled the dis_bottom_valid at the beginning but eventually fed the distance measurement into EKF. But why this was not the case for CASE1?
Here is the link to the log files
For CASE 1
For CASE 2
What parameters need to be tuned to fix the issue? Any suggestions would be much appreciated.
Kyu