Can anyone tell me what is going on here? I’m running PX4 on a sensor to get an EKF solution so it’s just attached to a multirotor. Why is the GPS good but the EKF way off?
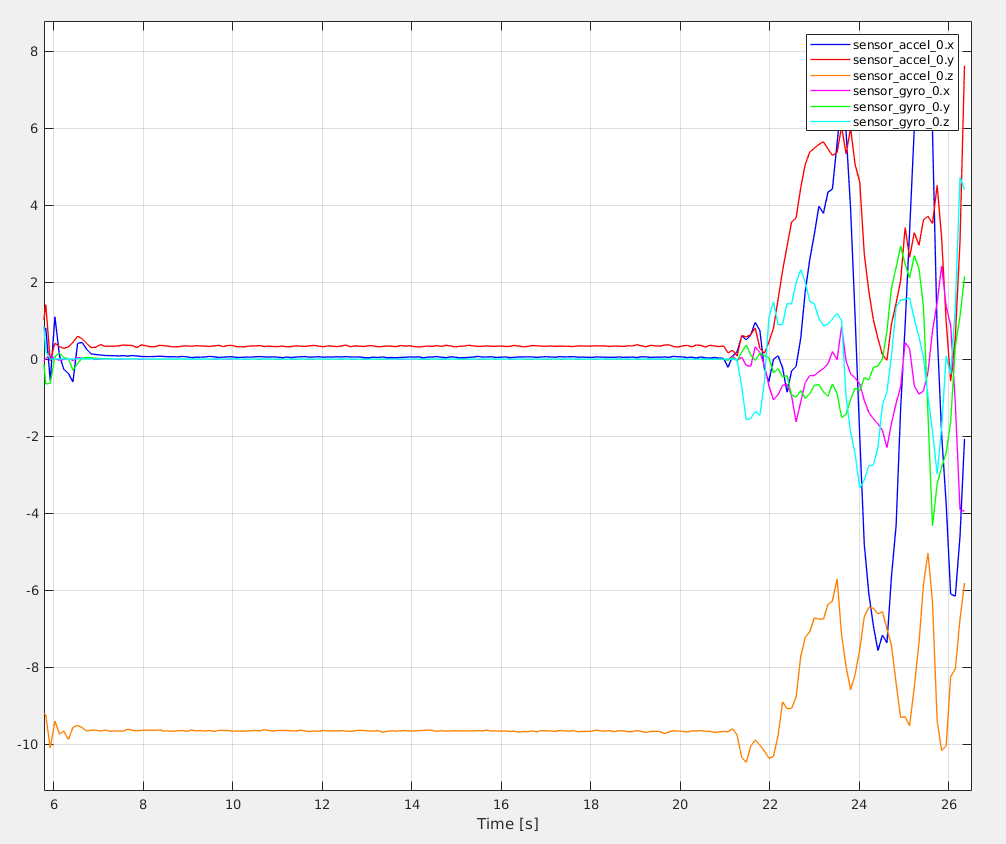
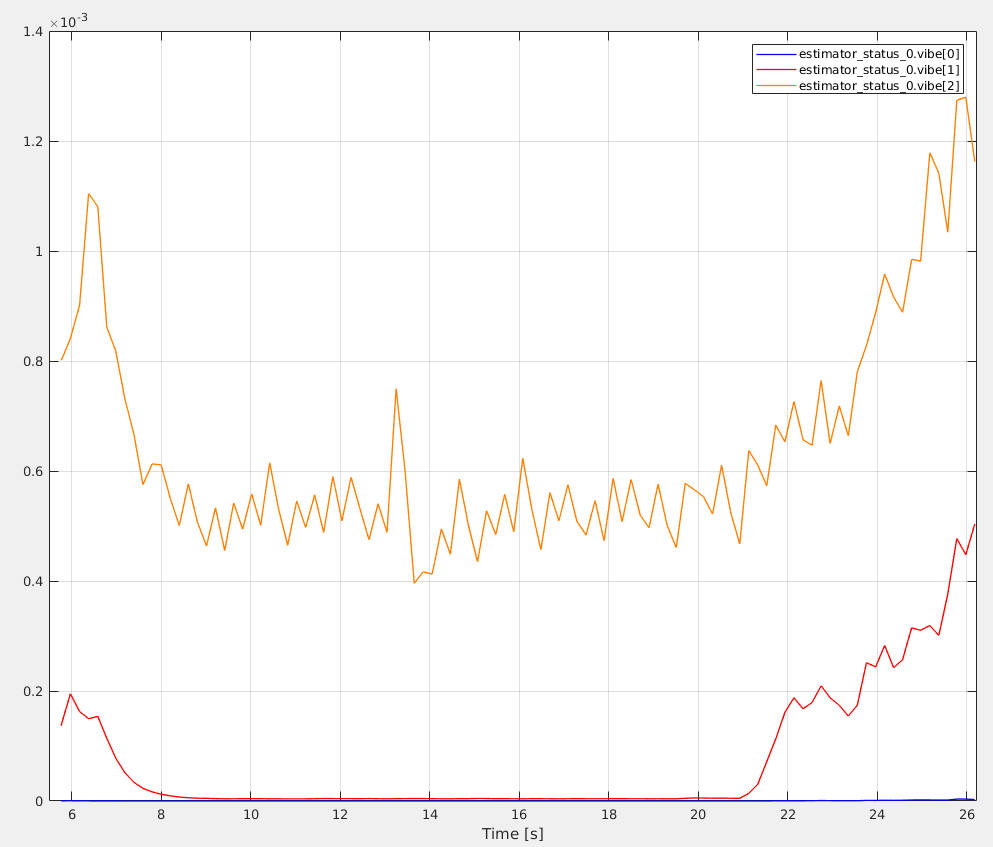
Do you have the module mounted isolated from vibrations?
Could you try a test when you walk around with the multirotor without powering it, except for the px4 sensor, in order to see the performance of the ekf without vibrations and mag interference?
The mag was calibrated outdoors and the yaw looks pretty clean. Here is a plot of the yaw overlayed with the cog. Is my rotation incorrect? https://ibb.co/mRDLkG
From v1.5.4 to v1.7.0 is there a new EKF check where the system has to be in a certain arming_state or in a certain nav_state to find the correct solution?
Also are you flying EAGLE’s? What version of BSP and qrlSDK add on are you on?
I think I’ve solved the EKF solution problem. Some of the modules were commented out. More specifically the navigator, dataman, land_detector, mc_control, and mc_att, Do you know which modules directly affect the EKF?