Hi,
I’ve been dealing with a persistent stability issue on my large agri drone and I’ve found some interesting observations I’d love some help understanding. Not entirely sure what the root cause is (may be PID and Vibration), so sharing everything I’ve found.
Setup: CUAV V6X PX4 v1.16 , Large agri frame - 1.5m wheelbase, ~20kg AUW, 34" props, 14S
Issue:
On the large frame, drone flies very stable right after gyro/level calibration. Power cycle it and it either wobbles immediately on takeoff or starts super stable and gradually becomes unstable after 2-3 minutes in Position mode. Stabilized mode seems mostly unaffected in the same conditions. Interestingly, it was also stable on first takeoff in Stabilized mode but wobbled immediately when switched to Position mode, gyro /level calibrating and power cycling fixed it temporarily.
The exact same flight controller, same firmware, same parameter set flies completely fine on an S500 frame. No post-power-cycle instability, no EKF faults, nothing. The issue only appears when the FC is moved to the large agricultural frame, setup configuration was updated accordingly.
This large frame itself used to fly fine, Earlier tests with the same default parameters on this same large frame were completely stable. No issues. At some point it started behaving this way and we can’t pinpoint what changed. This is part of what makes it confusing, it’s not consistently broken either. Sometimes the drone is perfectly stable for a full flight, sometimes it’s unstable from the moment of takeoff, and sometimes it starts stable and goes unstable mid-flight after several minutes.
Logs:
Complete Stable Flight: https://review.px4.io/plot_app?log=a625a276-f5b9-44de-9eb2-a2fe0cae9aea
https://review.px4.io/plot_app?log=b7cb923a-7fbc-4a2e-b3a8-6525a0a79d4c
Stable and eventually unstable Flight:https://review.px4.io/plot_app?log=1b8df850-434a-4ee0-95b5-fd95394f6822
https://review.px4.io/plot_app?log=44b5ce2b-d198-4384-b00b-f39bb66608f7
Complete Unstable:https://review.px4.io/plot_app?log=32a182a8-8059-4160-aacc-d0eef37378f4
It looks like you have not tuned your vehicle or setup filters for such a large vehicle. Have you followed the setup guide?
Do not auto tune with such a large drone IMO
Hi, thanks for the response.
Yes, I did follow the multicopter setup guide. After manually tuning MC_ROLL_P and MC_PITCH_P, surprisingly the very first test flight was actually rock stable, even in fairly strong winds, across Stabilized, Position, and Mission modes.
What’s confusing is that in later test flights the behavior became inconsistent. Sometimes it flies perfectly fine, but other times it becomes unstable either right after takeoff or after a few minutes in flight. That’s why I’m unsure if the issue is purely PID tuning, since I did observe a completely stable flight earlier, even at extreme RC stick controls.
I’m also wondering if DGYRO_CUTOFF 30Hz might be a bit high for a large frame like this, possibly allowing vibration to introduce gyro noise at certain points in flight.
Would you recommend looking in that direction as well, or is there something else I might be missing?
Thanks again for the help.
Did back-to-back tests today, first flight was stable (Stabilized mode). Power cycled, second flight immediately unstable (twitchy oscillations, audible motor buzzing).
Stable Flight: https://logs.px4.io/plot_app?log=c44e0757-dc94-4ebd-b3b1-865030800586
Next flight ,Unstable: https://logs.px4.io/plot_app?log=75da012e-55de-4373-a08d-28d324b1c52a
Stable flight ended with “offset committed” messages (IMU/Mag bias updates). Identical params otherwise.
Anyone seen this exact stable to unstable flip from one flight to next?. Motor mounts/props checked tight, but clearly something changes between flights.
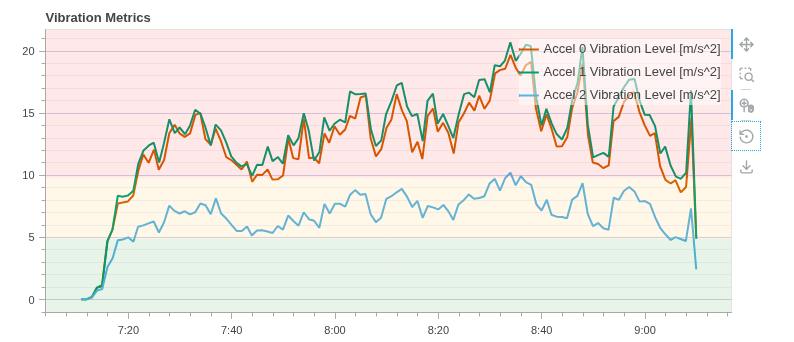
You have severe vibration, it is evident in both logs
After several testing, finally got consistent stable flights with GYRO_CUTOFF = 30Hz, DGYRO_CUTOFF = 20Hz, and static notches. Going lower (15-10 Hz) made it too sluggish. Intermittent EKF2 gyro faults mid-flight was solved after changing FC. Vehicle is auto tuned initially and tuned manually later.
But still having issues with high vibrations, motors getting heated up mainly with full tank load.
Even the drone is not holding its position well and visible slow movements in position hold.
Log: https://review.px4.io/plot_app?log=4c017836-fac0-449a-86a2-ae241faa3a02
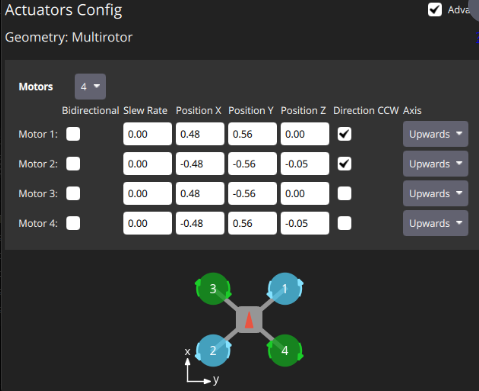
Here’s the motor geometry: