In the process of tuning a large Quad (X-frame, 30" props, 50% hover throttle with payload, MTOW 17kg) where I think the tune looks reasonable and response feel quite snappy in altitude/stabalized.
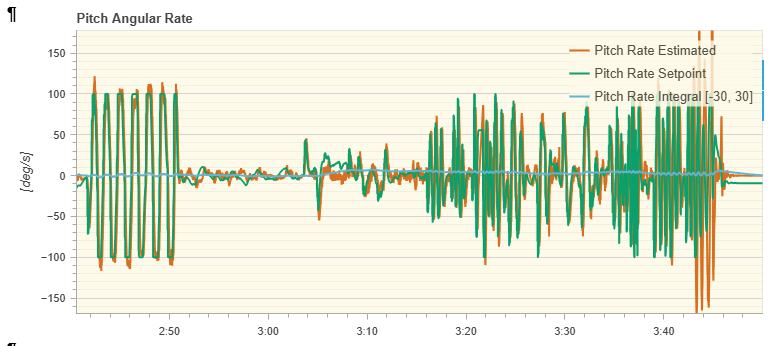
However when really testing the control system to it’s limits by rapidly going from min to max in angular velocity (steps in both direction with very little time in between) it is possible to make the aircraft unstable and crasch. This is not good flying by the pilot, more of a stress test for the control loop. I think the idea of creating control signals which cannot be tracked by the vechicle (e.g due to it’s size, inertia etc) is not good for the controller, and adding a maximum angular acceleration or target input filter would help mitigating this failure mode. I know it’s not the most elegant solution, more like a bandaid, still good though.
Looking at Arducopter, there are both ATC_RAT_RLL/PIT_FLTT (Low pass target filter), which only affect the input, and additionally there is ATC_ACCEL_R/P_MAX. These seem to have a massive effect when it comes to large drone stability, by not allowing too rapid input signals.
Flight review where instability and crash can be seen at the end.
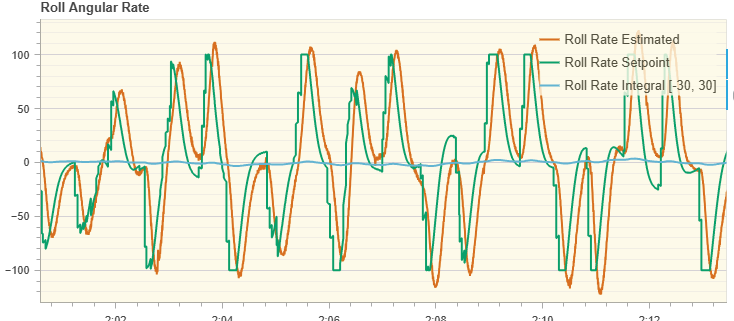
Performance looks acceptable in normal scenarios?
I cannot find these types of filter/limits in PX4, is there something similar?
Otherwise I thinking about implementing Target Input filter or angular acceleration limits in the rate controllers to test the theory out.