https://review.px4.io/plot_app?log=3a1b9c62-149a-46cf-8b3c-13aaaba2bd60
This link is a record of a successful flight lasting 22 minutes and 15 seconds. To check stability in various flight postures, while flying by rotating fast the roll and pitch stick in a circular motion at 8 minutes and 35 seconds, large vibrations occurred in the quadcopter and it almost fell, but it barely regained its balance on its own.
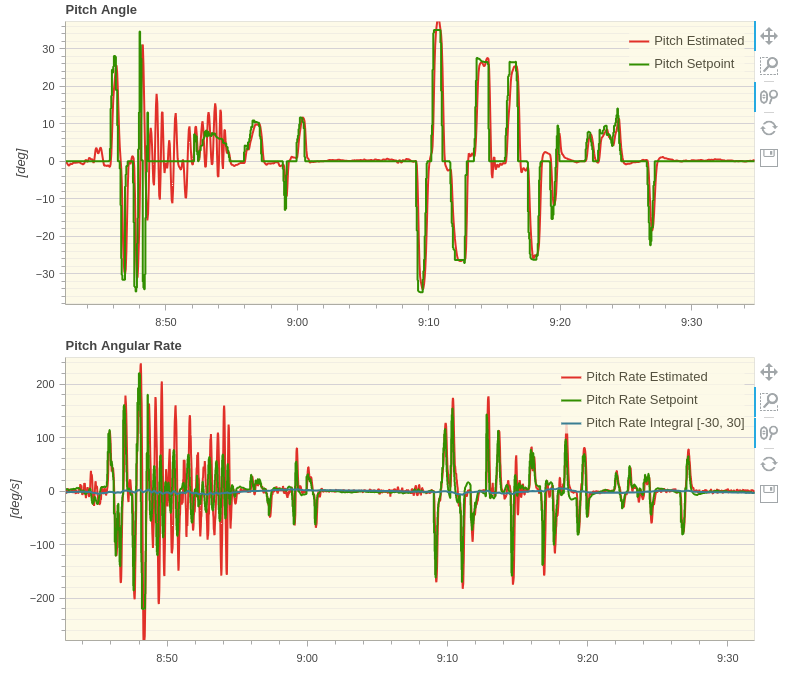
https://review.px4.io/plot_app?log=88e1694d-1f62-47ef-8167-b6577e3dd1f5
This link is a log of the second flight, about 40 minutes later and finally crashed. During this flight, while performing the same maneuver as before, keeping the nose to the east and moving quickly along a circle with a diameter of about 1 m, the multicopter began to experience large vibrations, forcing me to lower the throttle of the remote controller and bring the flight altitude close to the ground. It was lowered, but it continued to vibrate and failed to land safely.
It had previously crashed during a similar type of test flight. At that time, I thought the cause was the use of the default PID value.
What I’m curious about is whether the vibration and fall that occurs when this maneuver is performed is an inherent limitation that the PX4 cannot overcome.
It was a calm and warm day.