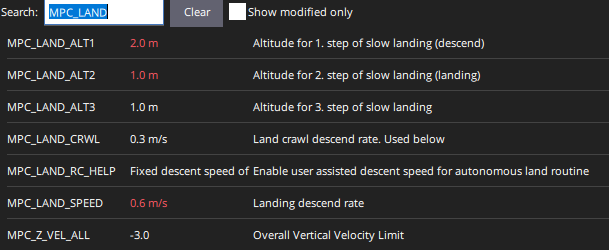
During missions and/or RTL, my drones land at speed that is too high. In earlier versions of PX4 the vertical speed slowed down at about 5 m just before landing. However now it doesn’t slow down and continues at the same speed all the way to the ground and lands very hard.
Is there a parameter used to set the final landing speed so it lands gently?
I’m using PX4 v11.3.1
Thanks
Joe