Hello! Logs
Looks like PX4 can’t detect landing in POSITION mode, after actual landing it’s continues to spin motors and after several seconds on the ground becomes crazy - tries to flip or jump
Hi @Yuriy_Homyakov,
You need to pull the RC stick completely down to make the land detection trigger properly. Otherwise, the thrust setpoint isn’t far enough from the hover thrust. You can also increase a bit the vertical velocity integrator to make the detection quicker (MPC_Z_VEL_I_ACC).
Hm, I pulled the RC stick completely down several seconds after vehicle is touched the ground, land detector should catch this. Because with current behavior i can only use killswitch to complete flight. If i try to takeoff after such undetected landing quad starts to going crazy
We’ve had this exact same problem with px4 before too. However, it happened when we were flying an Intel Aero with px4 – and we believe it was because the Aero is so lightweight and couldn’t detect that it landed when it landed on grassy/uneven areas. What kind of UAV are you flying?
I fly DIY 450mm quad, 1100 g TOW, also lightweight?
Are you landing on a rough surface? You might want to try landing on an entirely flat surface and see if that works. We aren’t 100% sure about this, but it only seems to be the small drones that we have the problem with. We’ll be running more tests when the weather improves with our larger drones… I’d be curious if anyone else has had this problem.
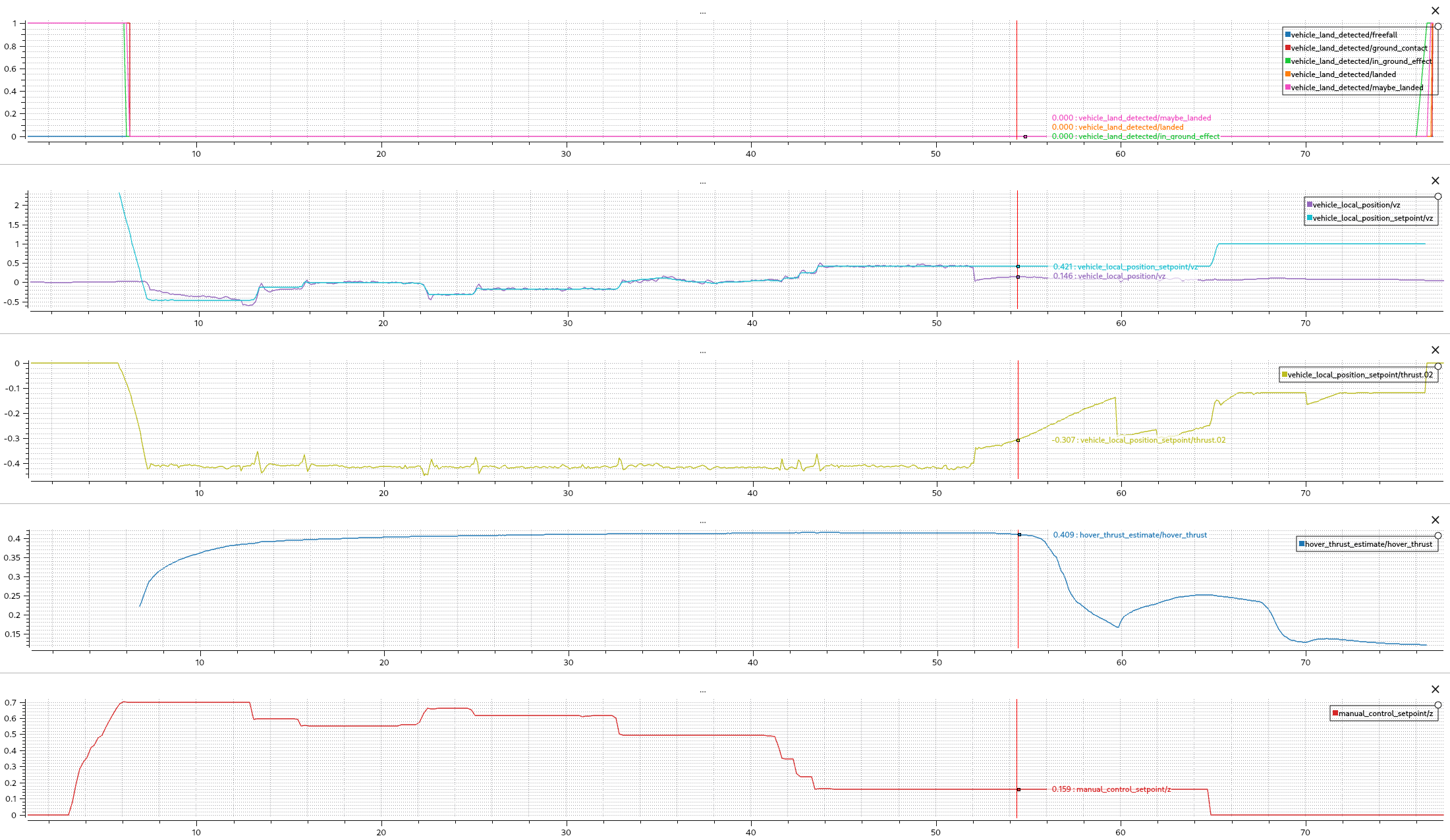
As shown in you log (and the screenshot I shared before), you pulled the stick down 12 seconds after touchdown. The hover thrust estimator starts to learn the new -wrong- hover thrust after 4 seconds, so the land detection cannot work properly after that because one of the checks of the land detector is to have a large difference between current thrust and hover thrust.
I’ve encountered this before too with a smaller drone. Next time I’m at the shop I’ll give it a shot; we’ve just gotten into the habit of using the kill switch after a flight, so I don’t have any recent logs to share.