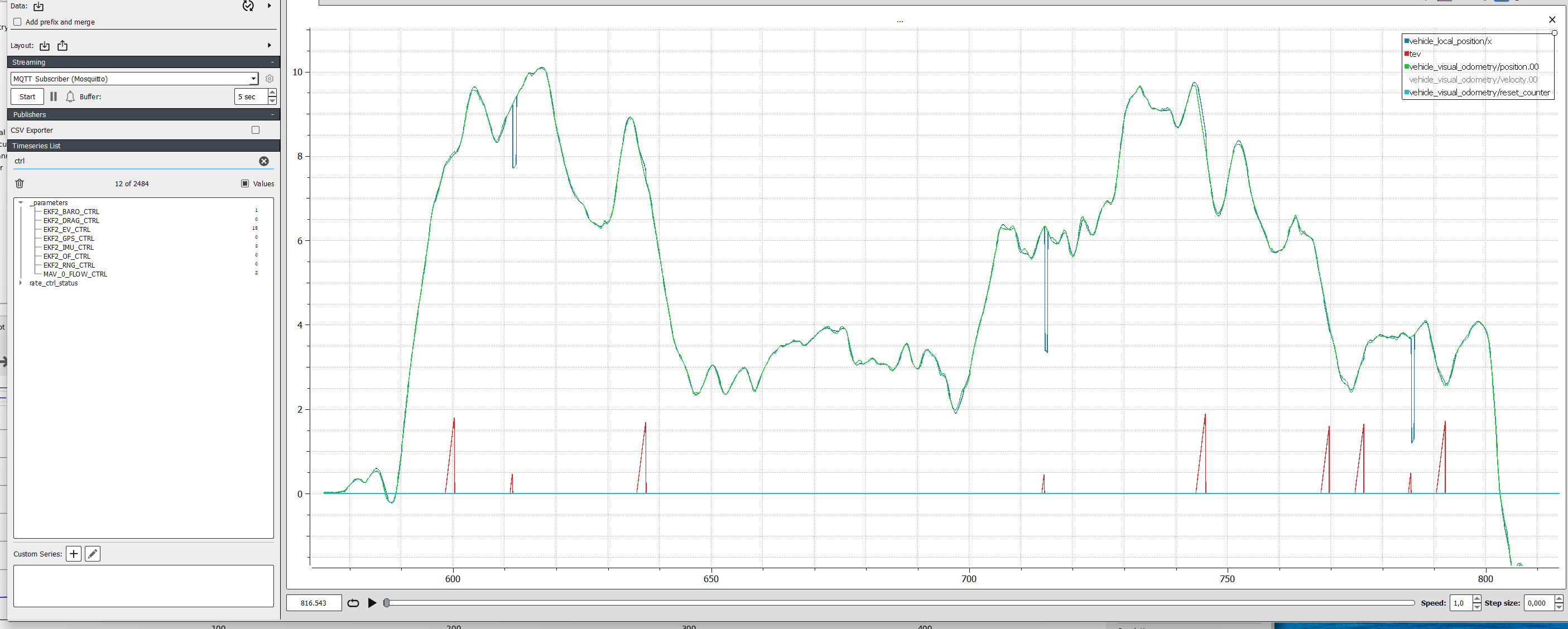
Autonomous drone flight w/ onboard companion jetson: lidar → external visual odometry. From image, can see (in legend order), PX4 local position estimate (notice jumps), tev = custom function: time difference in successive samples from visual odometry being sent to flight controller… The big tev jumps occur due to microagent (uxrce-dds agent) restarting, interestingly this doesn’t cause the local position jumps. its only the medium spikes in tev that cause these position jumps. plzzzz help!