I have a HITL Gazebo model of a Fixed-Wing with 4 props between tail and wings. I am having issues after going from software v1.12.3 to the newest using Control Allocation. At the beginning of the flight the GroundSpeed starts to go way low with respect to Airspeed, then a message of No Global Position appears, then the plane position readjusts. It can happen just once, several times, and sometimes it does not recover at all.
Thanks for raising it. The problem could be that the way you set it up, it will use differential thrust of the motors to control the vehicle’s attitude, and not only the control surfaces. If that’s not desired you should set the position of the motors to 0 (e.g. CA_ROTOR0_PY), such that they have no torque effectiveness. With use dynamic control allocation by default & cleanup old airframes by bkueng · Pull Request #19990 · PX4/PX4-Autopilot · GitHub the position fields for motors on a FW will be hidden.
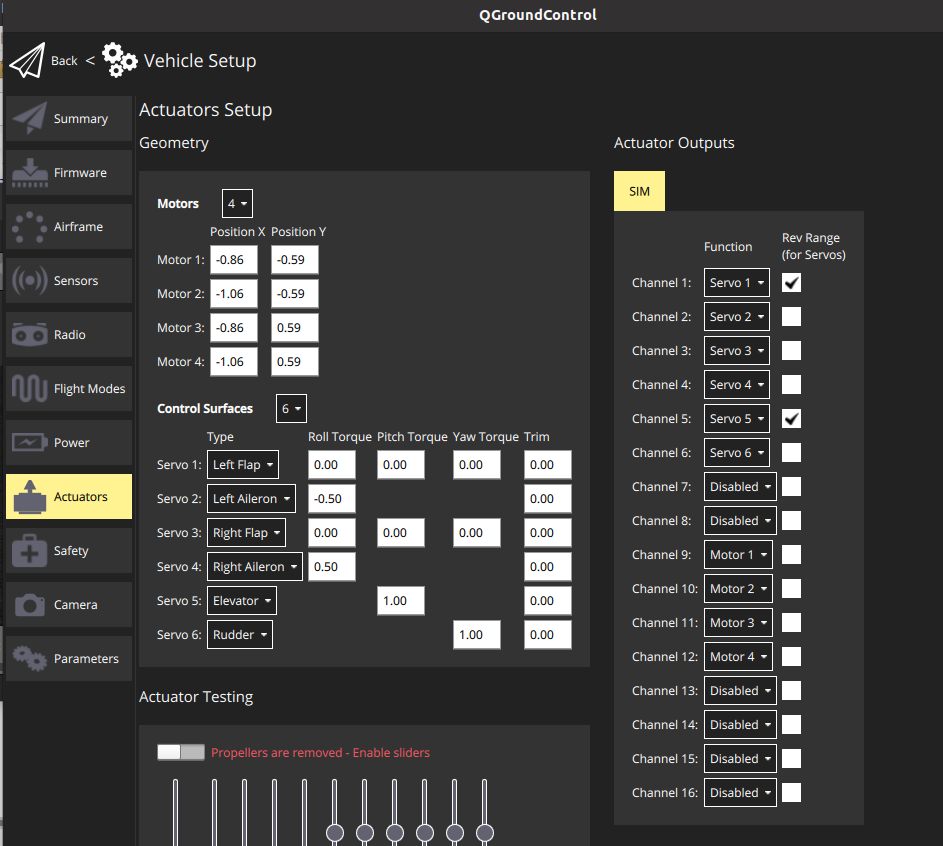
Let me know if that was it, and if not, please attach a screenshot of you Actuator setup page in QGC (easier to spot issues that way instead of simple parameter files).
Thanks @sfuhrer. The same happens if I put them to zero.
I found another piece of information that may be helpful.
If I manually move the plane in Gazebo after starting the mission before taking off or if a put a little object to make the plane turn before taking off, this problem doesn’t happen, it seems like it needs a fair amount of dynamic change (most likely in Yaw) to compute its attitude from the very beginning. I have gone through many EKF2, IMU, GPS, Magnetometer, Airspeed parameters, but without success so far.
Okay then the problem doesn’t look to be related to control allocation, but rather with either the estimation or the simulated sensor data by the looks of it. Do other HITL setups work?
Yes other fixed wing work with no problem, but they have just one prop and since mine was working with former mixing files, that’s why I was thinking about the control allocation or maybe some new changes on the parameters.