I want to get parameter of vmount/gimbal.
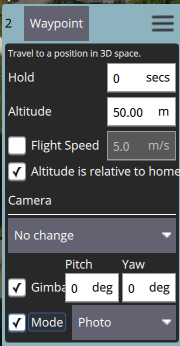
the pitch and yaw of gimbal
which uorb topic do I need orb_copy?
And I want to publish the pitch and yaw of gimbal to QGC,eg:
Which uorb topic do I need to publish?
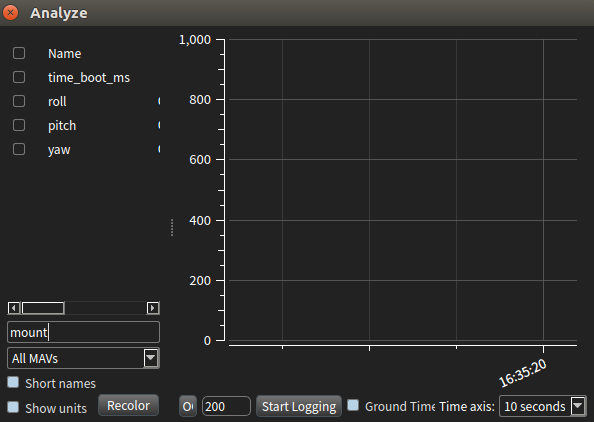
The mavlink message that you are looking at in QGC is MOUNT_ORIENTATION.
Check the vmount module if that is published there.
And if you write a few sentences of what you are trying to do, it would be easier to help. Your questions are very cryptic.
1 Like