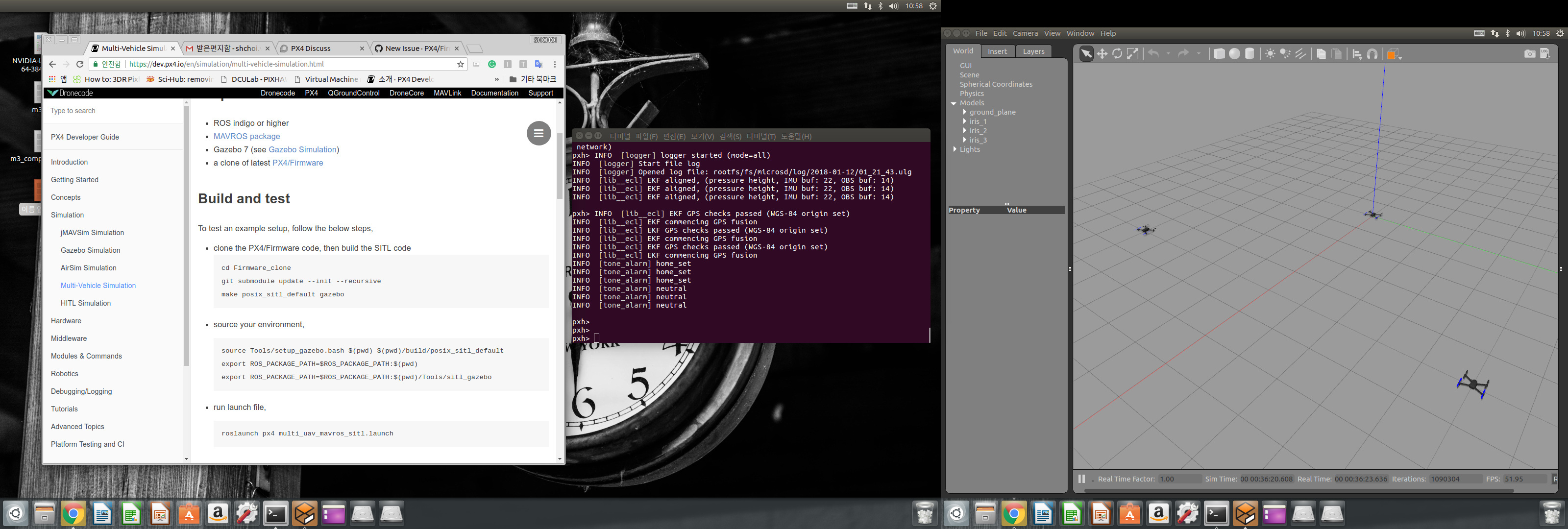
This below picture is my ubuntu…
I command “roslaunch px4 multi_uav_mavros_sitl.launch” on my terminal.
After that, Gazebo is popped up and I can show 3drones model.
But, I have only one terminal that is just showed “pxh>”.
My question is this. Why can I see just one terminal? In my think, this one terminal has 3 simulators.
How to command each drone?
Yeah I’d like to know this also. There should be a way to have two separate PX4> prompts in two separate terminals…
You can control each drone with Qgroundcontrol demo following updated documentation. I am not sure about control from terminal I think to control the drone with terminal then you need to send control command with ROS to the udp corresponds to drone.
How about you using dronekit?
In my case, finally I make some GCS using dronekit.
The GCS which made myself with dronekit can control each drone.
I’m not sure, but it is helpful.