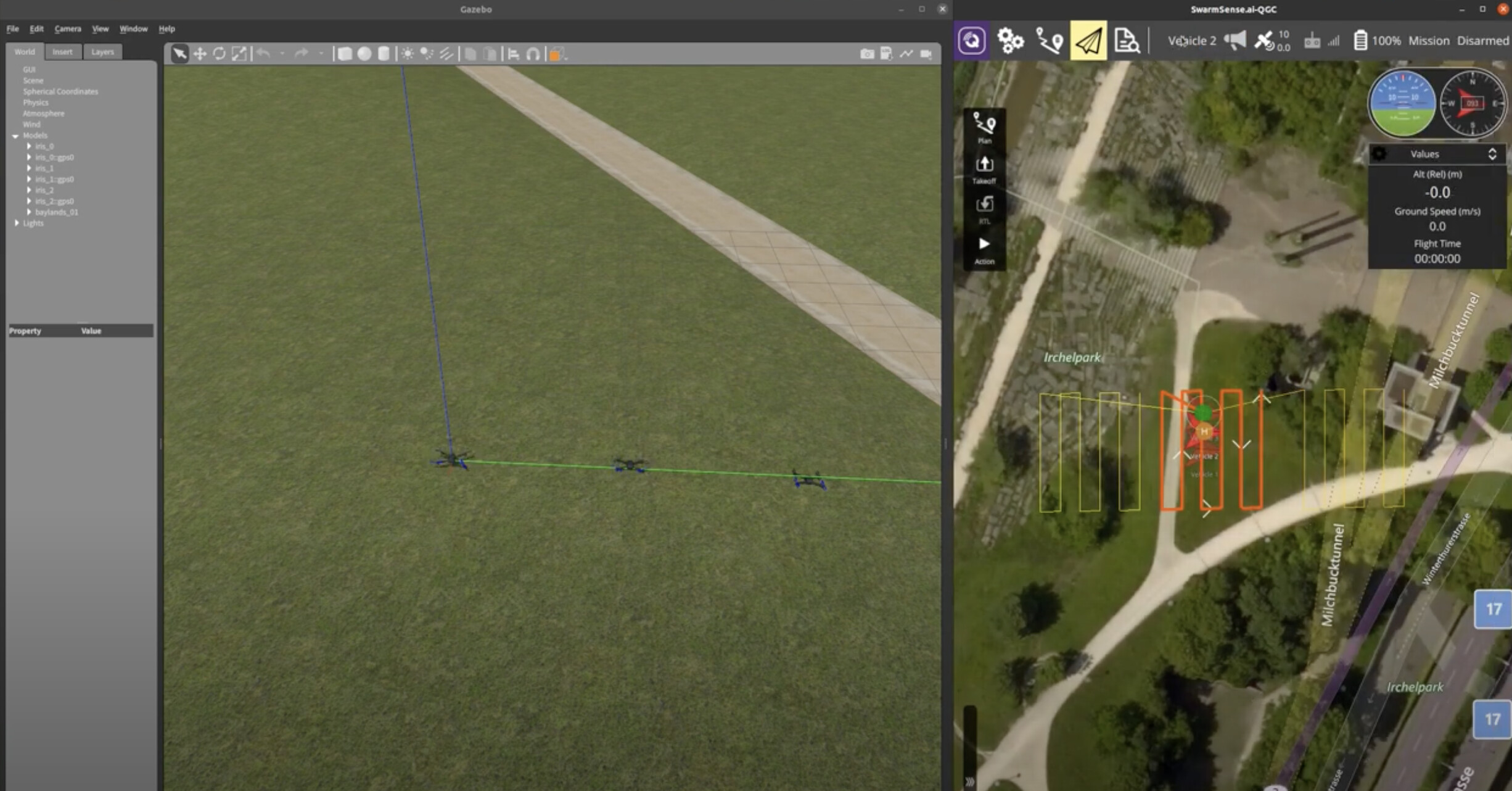
I want to make an environment including Multiple drones + PX4 + QGC.
I am using the Cygwin(v0.8) for PX4(v1.10.1) in windows
I use the make px4_sitl_default none_iris command.
But It supports just one drone.
I want to run it like a multiple gazebo simulation.
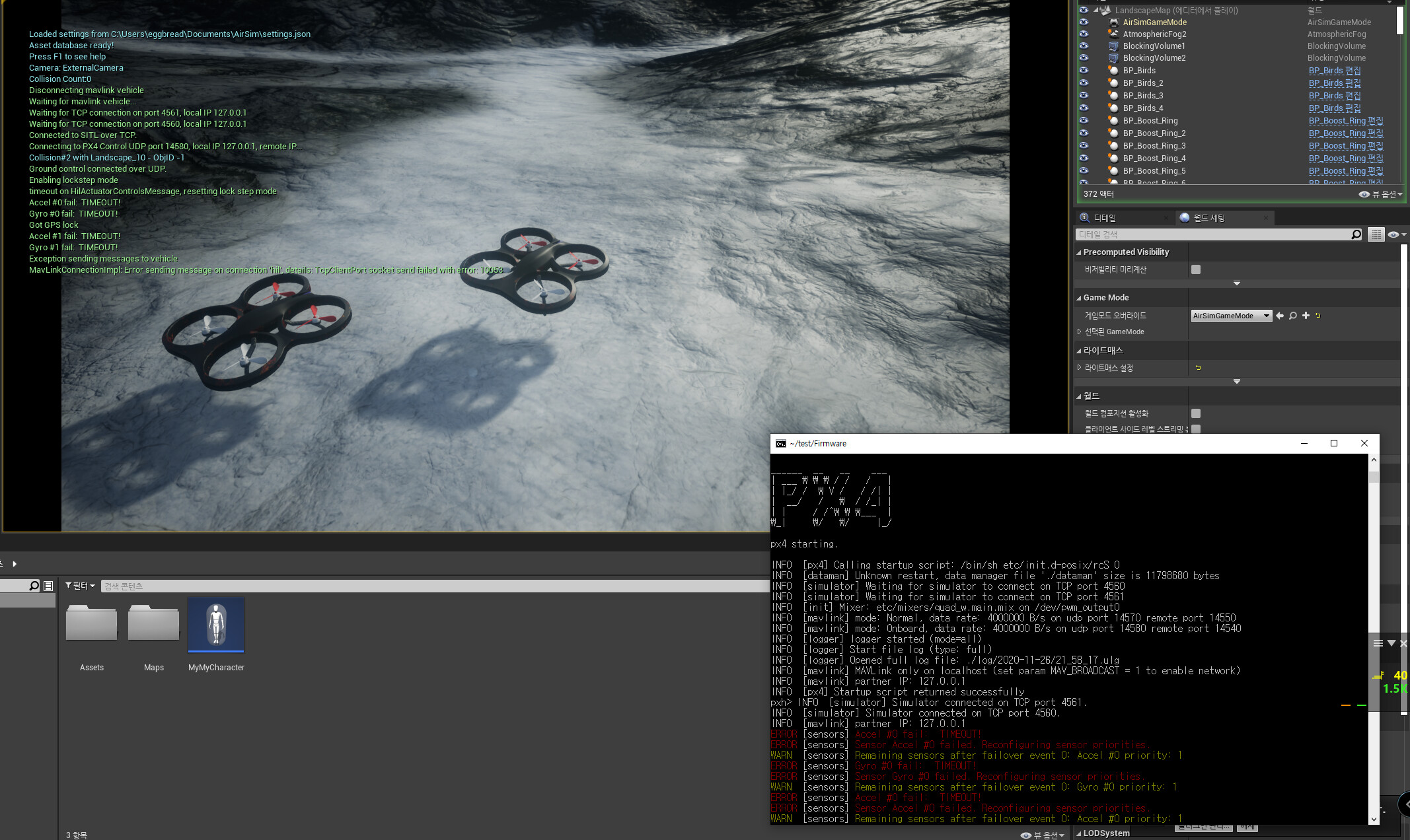
I added one more px4_task_spawn_cmd() command in the ‘simulator.cpp’. And then tried with 2 airsim drones.
It can be connected with PX4(port 4560, 4561).
But I can’t send the command by using command. And It shows error msg like shown below.
I think px4 cannot send the second drone mavlink msg.
Is there any way to do this? What should I do?
Thank you.