I am running a python script on Jetson Tx1 and offboard control the drone. ref: Offboard Mode | PX4 User Guide
When running the python script, the QGroundcontrol shows “offboard”.
Python script ref: MAVROS Offboard control example (Python) | PX4 User Guide
If I would like to switch the mode to RC controller (it should shows “Position” in the QGroundControl) for emergency situation, how do I use RC controller to take charge of the drone from the python script (offboard control)?
When using RC controller, the QGround controller should show “Position”.
However, when running python script, the offboard mode cannot be changed by RC controller switch.
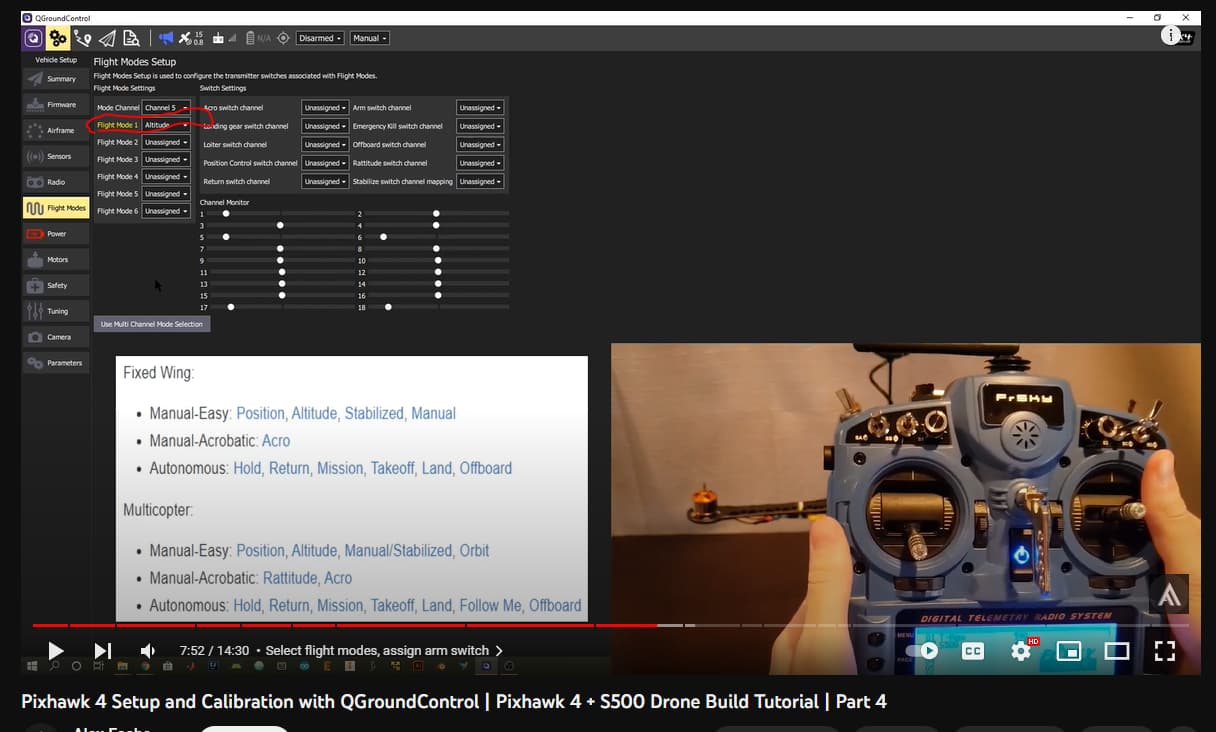
I tried to set the RC switch mode by this video and photo: Pixhawk 4 Setup and Calibration with QGroundControl | Pixhawk 4 + S500 Drone Build Tutorial | Part 4 - YouTube
However, it still does not work, so I guess it may be a QGroundcontrol issue ?
Thanks a lot for your help
The photo of the RC controller switch

ref: Radio (Remote Control) Setup | PX4 User Guide
Thank you very much