Hi,
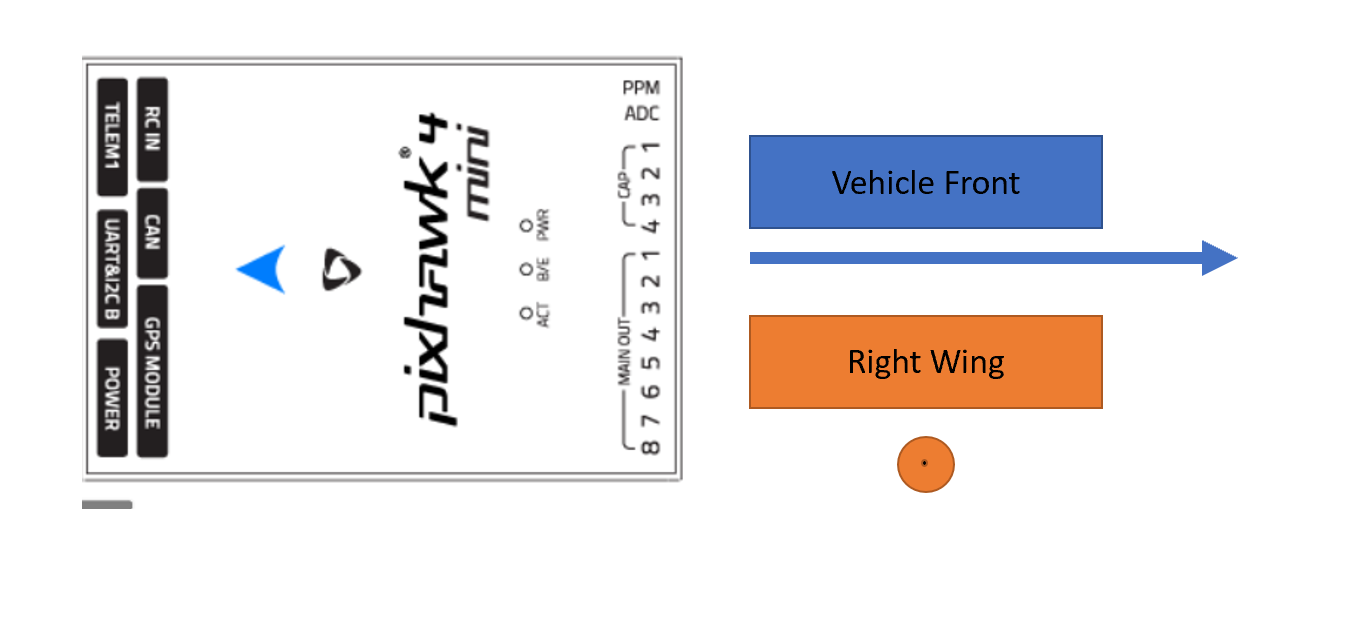
I am struggling to set the orientation of the pixhawk. Please see the attached image. The right wing points out of the plane.
My approach was to set an yaw orientation of 180 ° and add a roll offset of 90° this works perfectly fine for the accelerometer calibration. However, I can’t level the horizon. I am using a pixhawk 4 mini on the latest stable.
Thanks a lot for your help.