I am using a Holybro OSD chip with my Pixhawk 6C mini and have it set to display the “home altitude”, which I understand is the relative altitude, or altitude above home point.
This measurement is usually under-reading by 3-5 meters, i.e. when the copter is on the ground, the OSD displays -3 to -5m.
I have set the QNH parameter, but in log files my barometric pressure doesn’t look accurate but my GPS altitude is more accurate.
I read in an old Arducam OSD docs file:
“When APM boots and gets GPS lock, it checks your height above sea level than calibrates you barometric pressure sensor. After this it is using barometric height by default. But you can change this in APM parameters. You can use only GPS or a mix of both also.”
Is this true of PX4?
If so, is it possible to set the relative altitude data to display GPS+Barometric altitude, or just GPS altitude?
If not is it possible to improve this in any other way?
After a second or two, the Ha updates and the OSD reads
Ta = 82 m
Ha = 0 m
Then after a couple of seconds again the AMSL updates ( I guess from the GPS), and so does the the Relative Altitude, which seems to be relative to the AMSL, so I get:
Ta = 11m
Ha = - 70 m
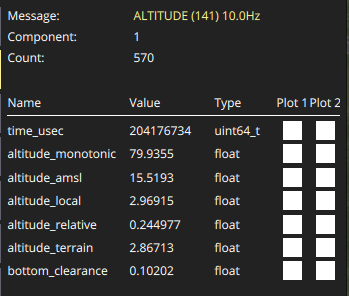
The true altitude in AMSL at this location is 16m
I checked the MAVLink inspector and relative and AMSL altitudes are roughly correct.
So if anyone can help with why these values (altitude_amsl and altitude_relative) are not being displayed on the OSD, that would be very helpful thank you.