Hello PX4 team and community,
We are developing a compact and high-performance UWB system intended for use on UAVs, and we are very interested in collaborating with the PX4 ecosystem.
Our UWB system supports more than 200 tags and anchors simultaneously, and all nodes are able to communicate with each other. As a result, a single data frame can contain a large amount of information, significantly exceeding the typical uORB message size.
Currently, we are facing the following challenges when integrating with PX4:
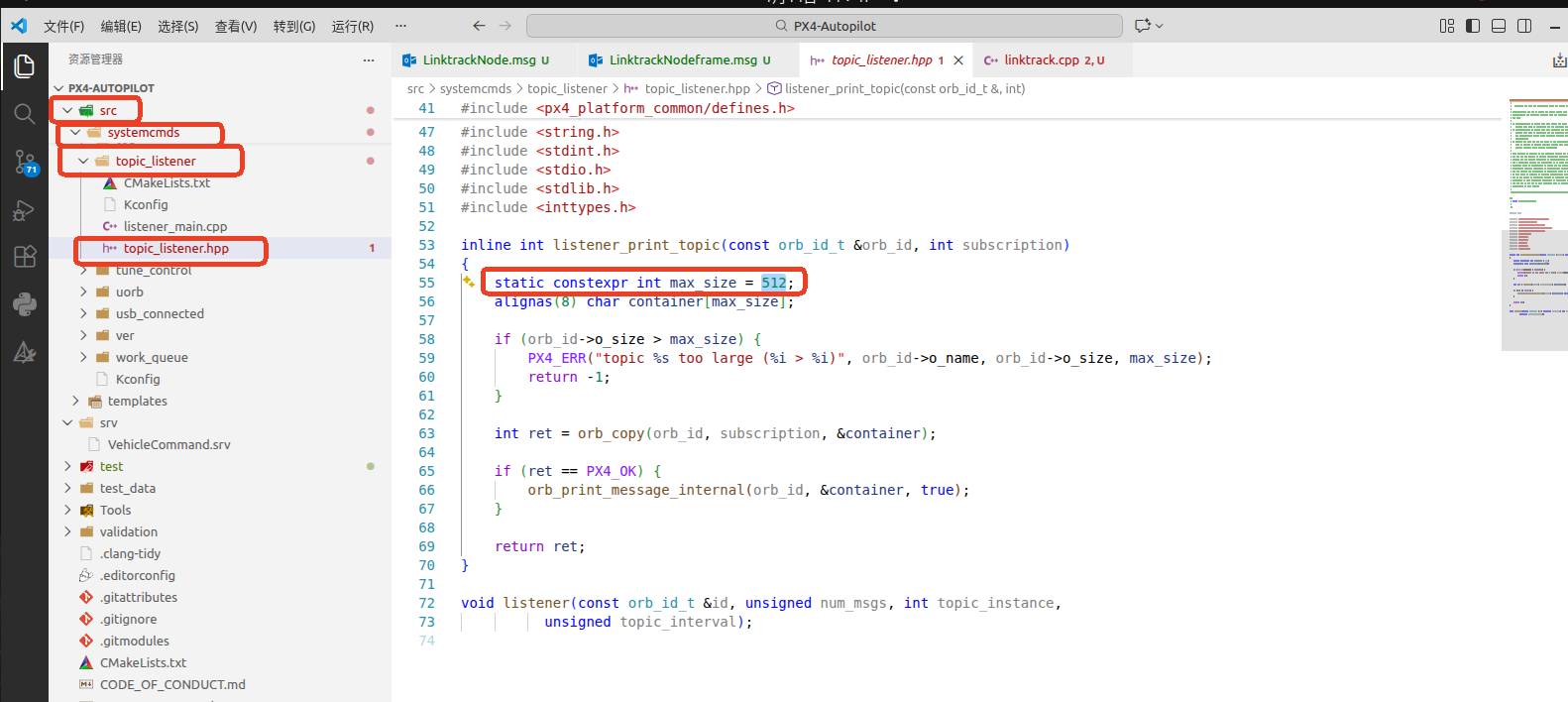
- uORB message size limitation
Our sensor data payload can easily exceed 512 bytes, especially when reporting the full state of many tags and anchors in one update.
We understand that uORB is designed for:
-
fixed-size messages
-
relatively small payloads
-
high-rate real-time communication
However, our UWB data is more similar to:
-
high-density perception data
-
variable-length frames
-
batch updates of many nodes
This makes it difficult to fit the data naturally into a single uORB topic without truncation or heavy fragmentation.
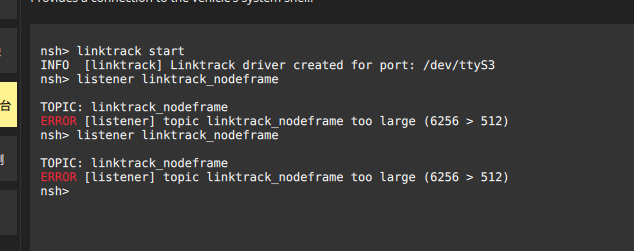
- System / QGroundControl restart when modifying listener / message size
We attempted to increase the allowed message size by modifyingtopic_listener.hppand related definitions.
After doing this:
-
PX4 boots normally
-
but QGroundControl repeatedly restarts when using
listeneror inspecting topics
This suggests that:
-
some parts of the PX4 ecosystem (uORB metadata, MAVLink streaming, or tooling)
assume standard message sizes -
increasing message size directly may break these assumptions
Questions
We would appreciate guidance from the PX4 developers on the following points:
-
What is the architecturally recommended approach in PX4 for streaming large-scale or variable-length sensor data (similar to high-density point clouds or, in our case, multi-node UWB data)?
-
Is directly increasing the maximum uORB message size frowned upon due to its impact on memory and ecosystem tools?
-
Are there existing patterns or examples within the PX4 codebase for safely handling such data, perhaps using alternative IPC mechanisms or data streaming protocols?
Thank you very much for your time and support.
Best regards,
<A UWB-Sensor company from China>