I am trying to convert uorb topic “vehicle_odometry” into “nav_msgs/Odometry” in order to do slam using only pixhawk without gps module.
However, when I was testing the position and velocity at Imu, I found that the position and velocity are totally wrong. Only Imu accleration and Imu angular velocity are correct.
It means that The data sensed by IMU are reliable but the position and velocity estimated by EKF are incorrect.
Here is the data logging when I was walking in straight line. I walked forward for 10 seconds and stopped for 10 seconds. After that, I walked foward for 20 seconds and stopped for 20 seconds. Finally, I turned back and walked toward initial point within 30 seconds in the same straight line and stopped for 30 seconds. I can reach the initial point finally.
I did the same testing on the same line for twice. One is tested without GPS and another one is tested with GPS.
Position and Velocity are come from uorb topic “vehicle_odometry”. Accleration is come from uorb topic “sensor_accel” and Angular velocity is come from uorb topic “sensor_gyro”.
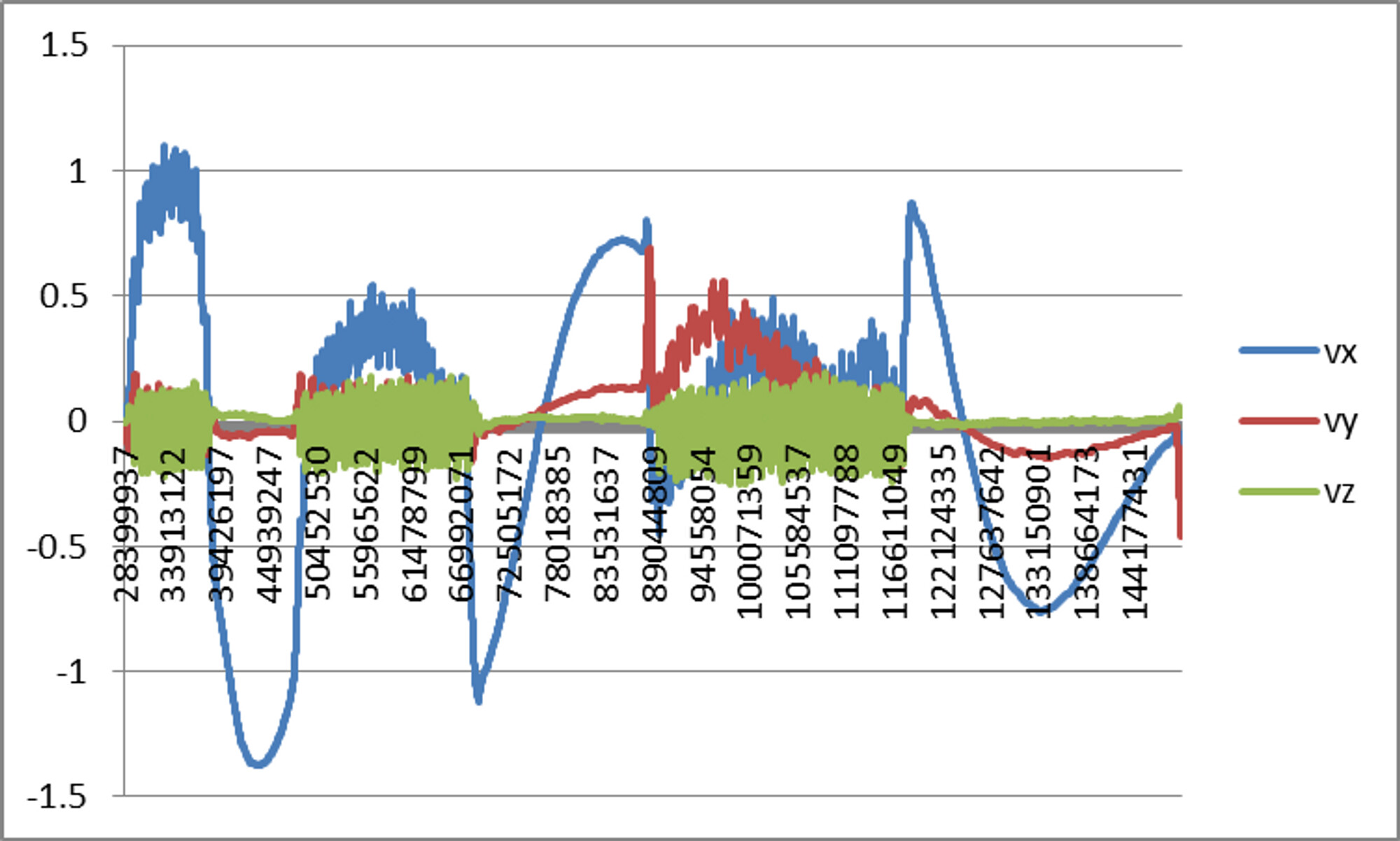
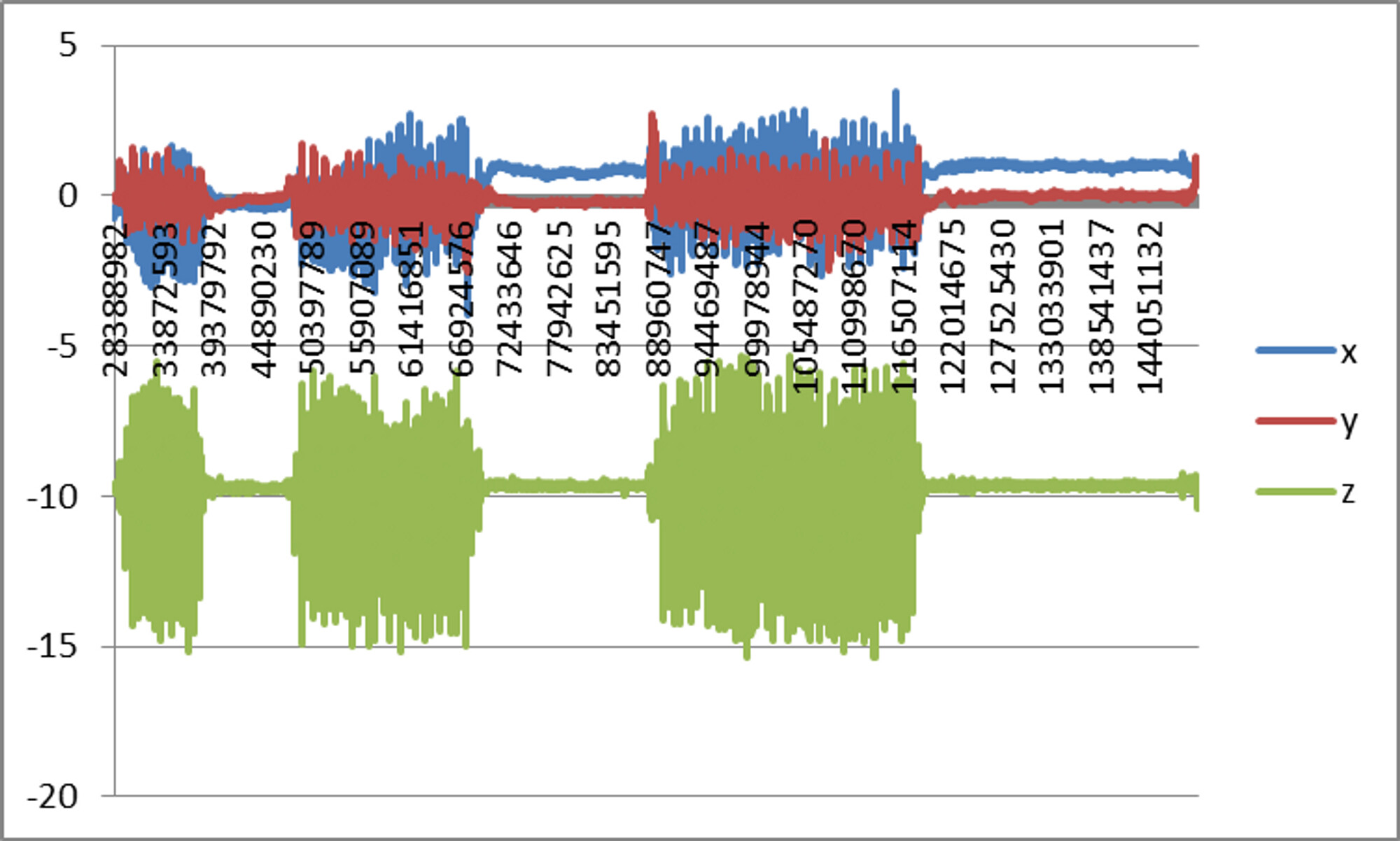
Without GPS:
Position

Velocity
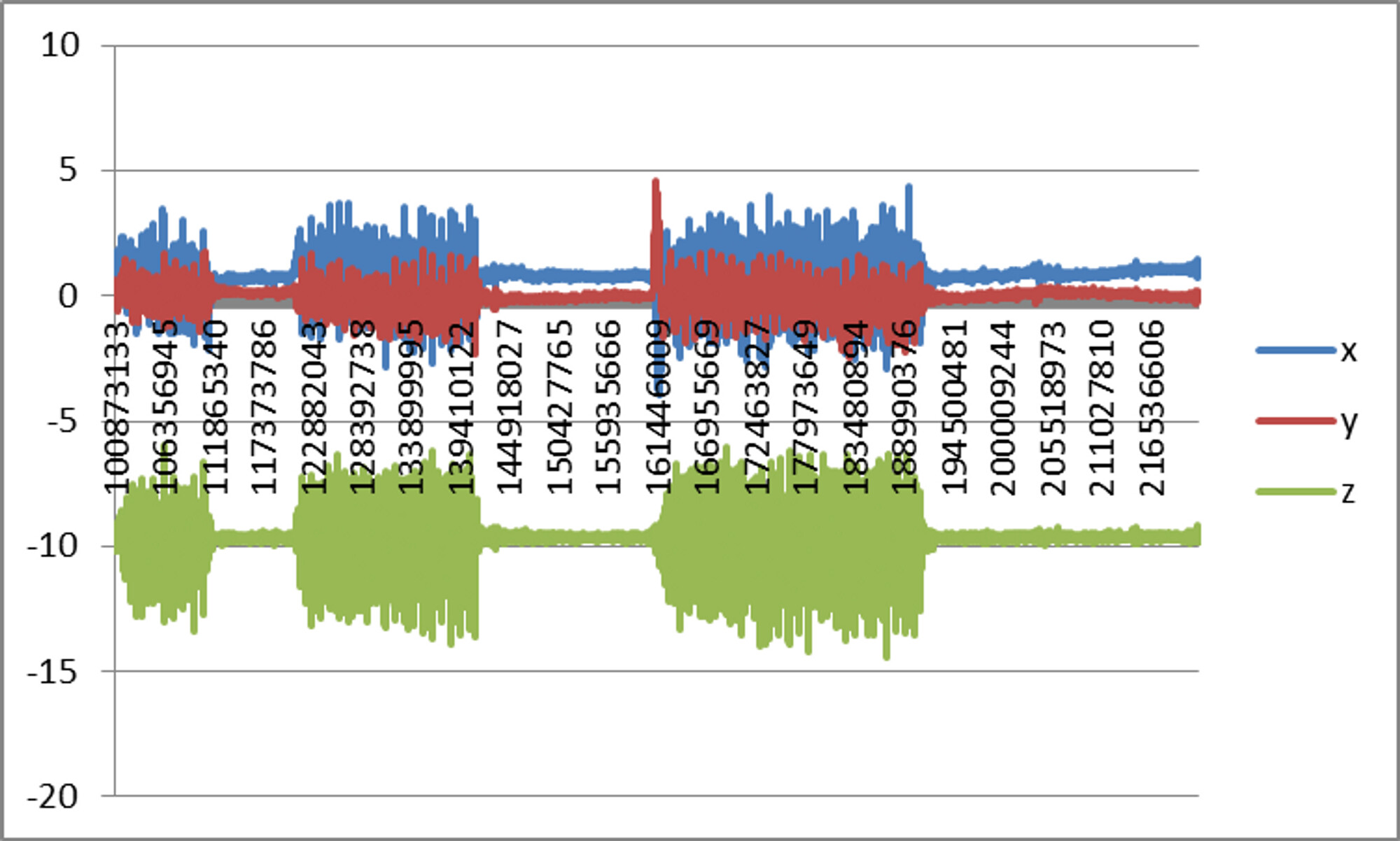
Acceleration
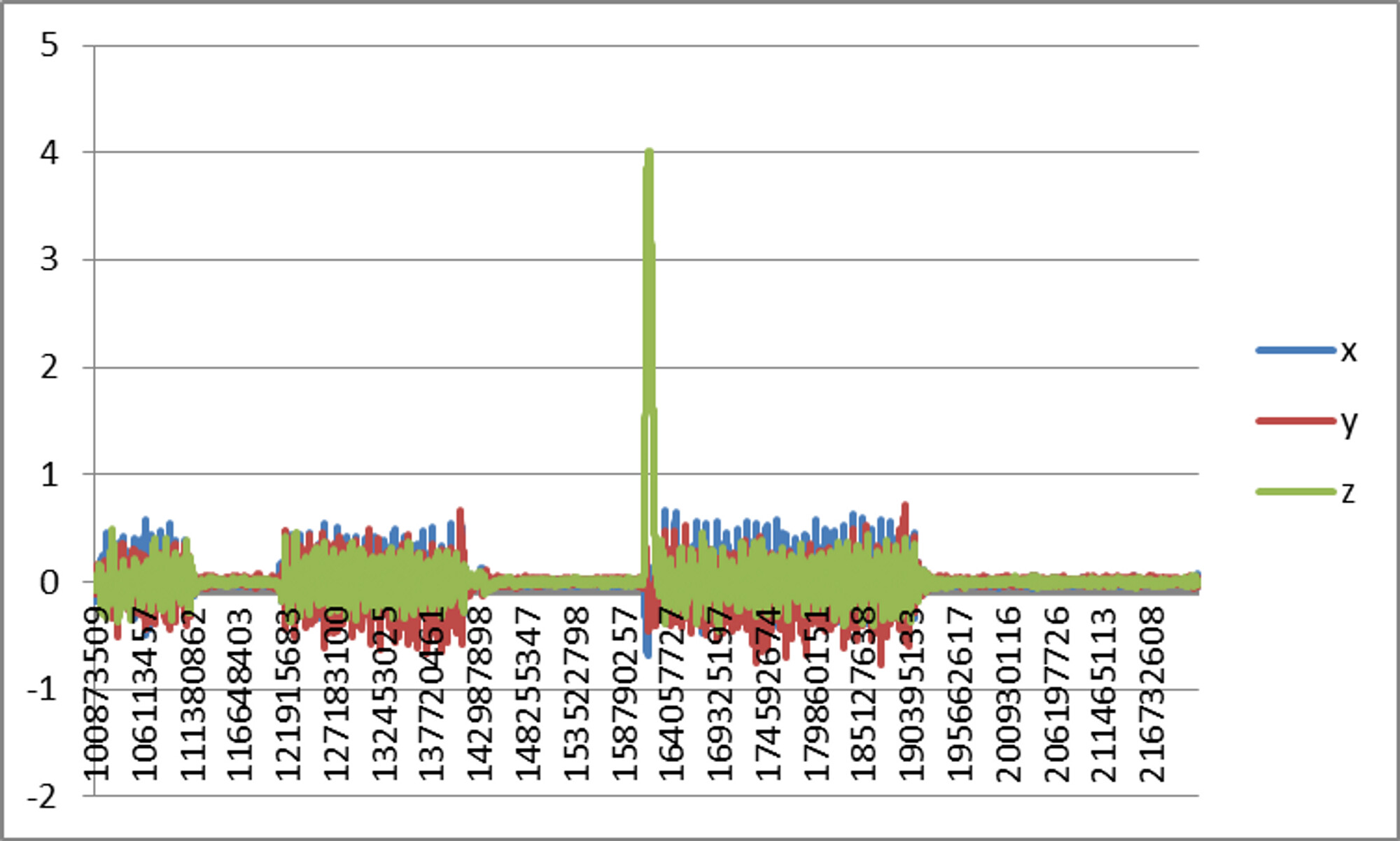
Angular Velocity

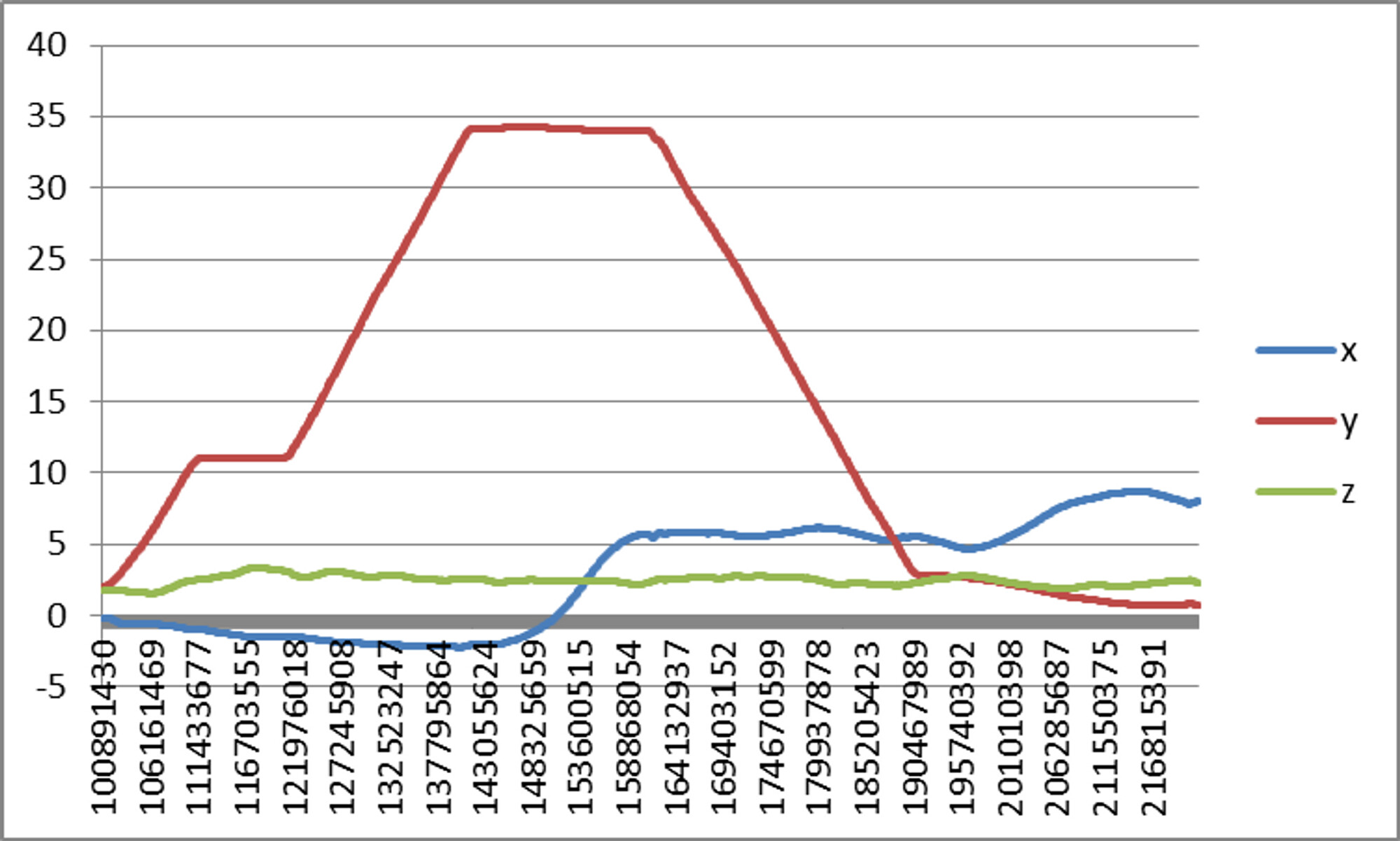
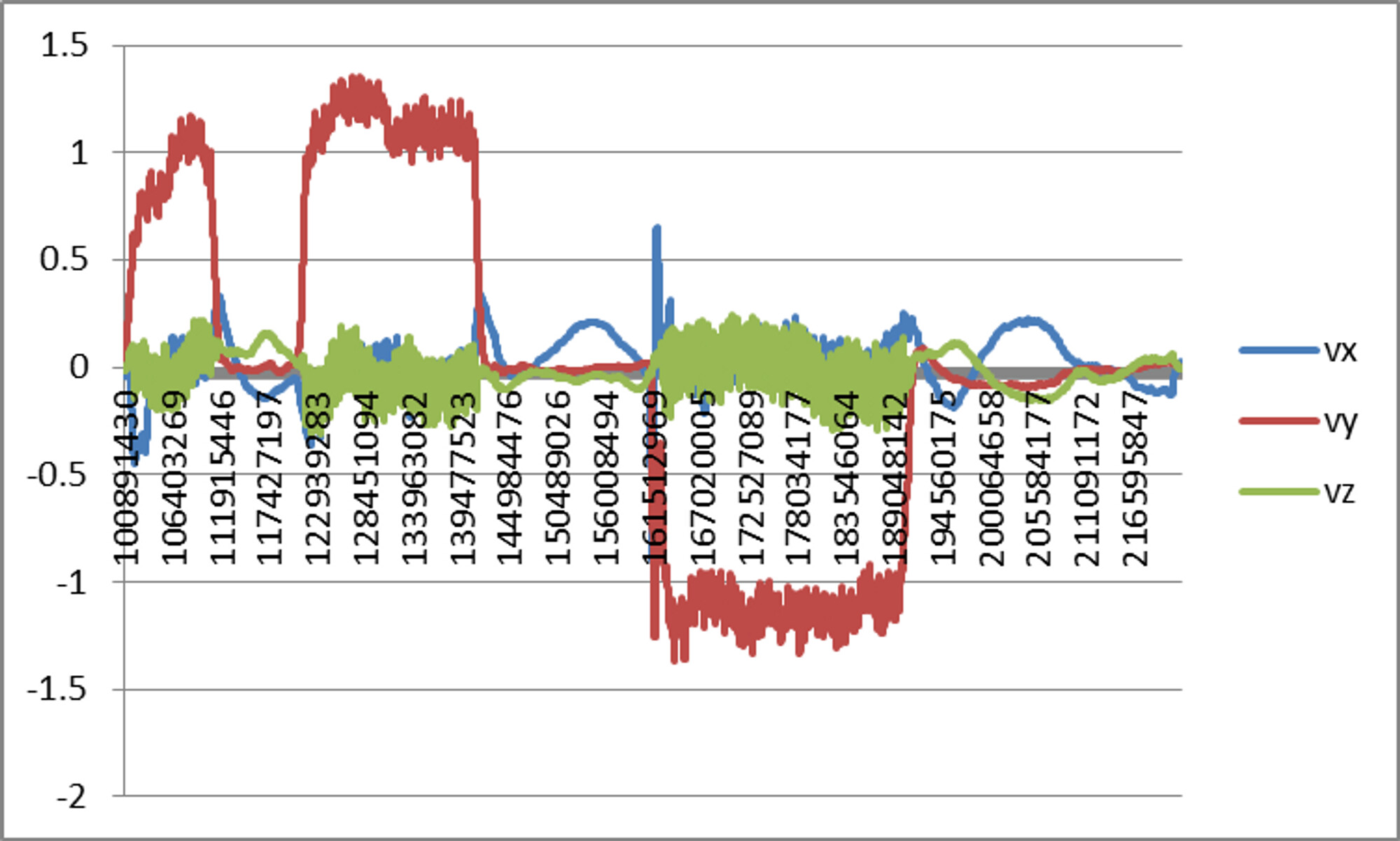
With GPS:
Position
Velocity
Acceleration
Angular Velocity
From above data, we can see that the position and velocity of “vehicle_odometry” are reason reasonable when there is GPS. However, when there is no GPS, there will be negative velocity after I have done the movement. The negative velocity made the position going from positive to negative.
My question is, is there any parameter I need to change in order to get accurate position and velocity with only Imu? I want to do slam without gps and with only Imu sensor on the pixhawk.
