I would like to create a fake telemetry log with pymavlink to display/plot it in UAVLogViewer - eventual goal is to convert logs from the Sensorlogger app into Mavlink tlog for viewing
I can create a log with this Python script, but it seems I am either not using the right message type(s) or am missing some required messsages to generate a bona fide flight logfile.
I can open this file in UAV Log Viewer and the fields I create are visible:
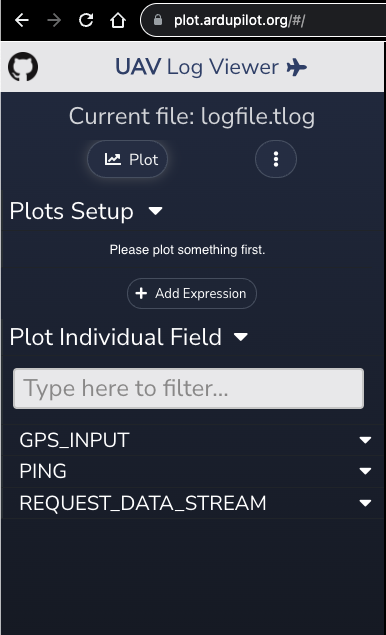
However, trying to plot say GPS_INPUT.lat fails with ‘TypeError: Cannot read properties of undefined (reading ‘changeArray’)’
also, several of the tools under pymavlink/tools fail in reading the log, so I must be missing something
Is there a document which describes required Mavlink messages which must be present in a tlog? Which dialect should I choose?
thanks for any hints.
Michael Haberler
.