Hello everyone,
I am implementing the connectivity between the Pixhawk(2.4.8) and webapp. Please find the project setup information below,
Setup details :
- pixhawk 2.4.8
- ESP 8266
- M8N gps
- 2 wheel with motor
- R8FM Radio link to control motors
- Battery (2200mAh)
Development Tool:
I Using “Arduino IDE” tool to write code in ESP8266.
Installed Libraries:
- MAVLink.h
- Arduino.h
Setup Image:
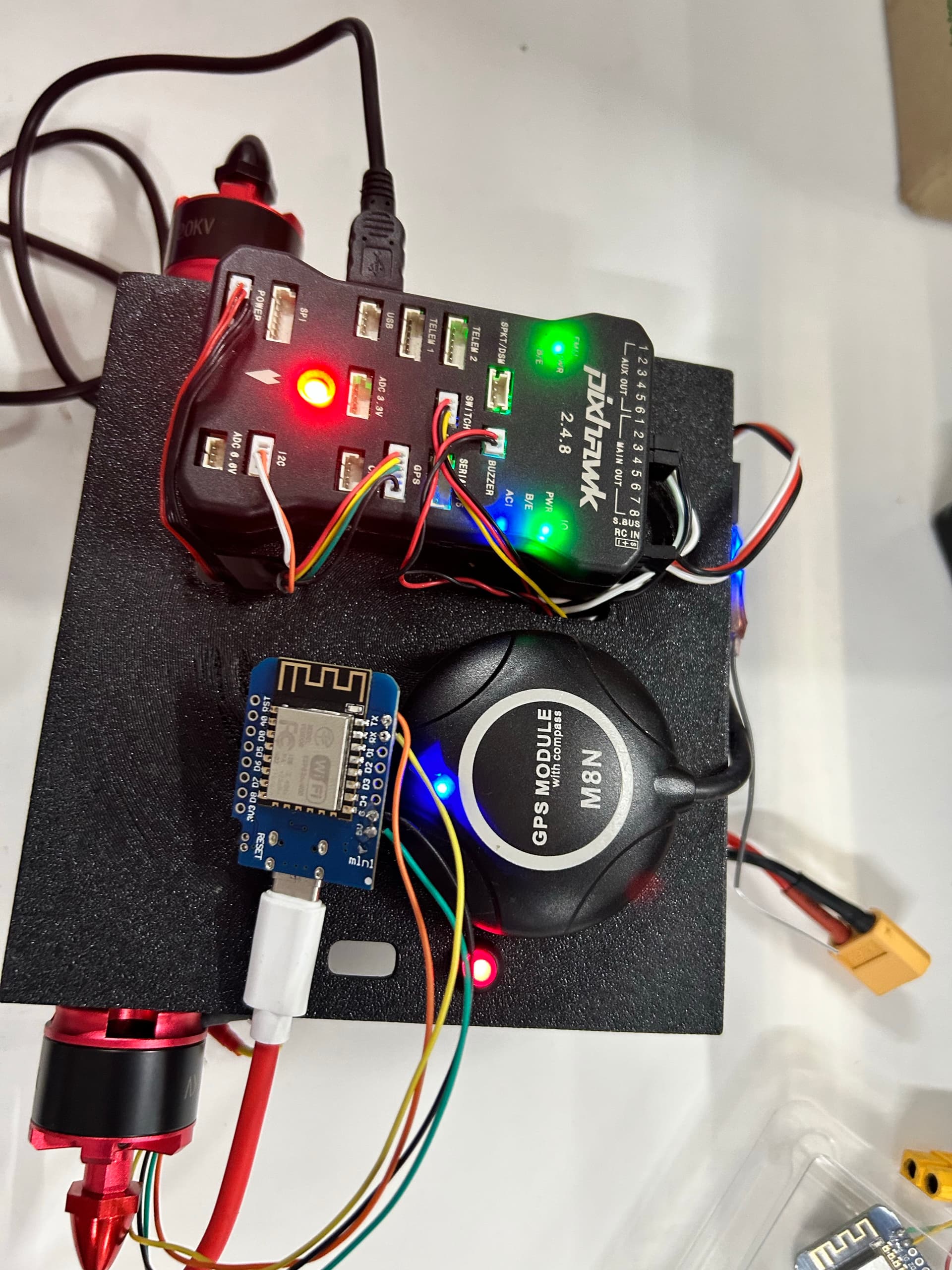
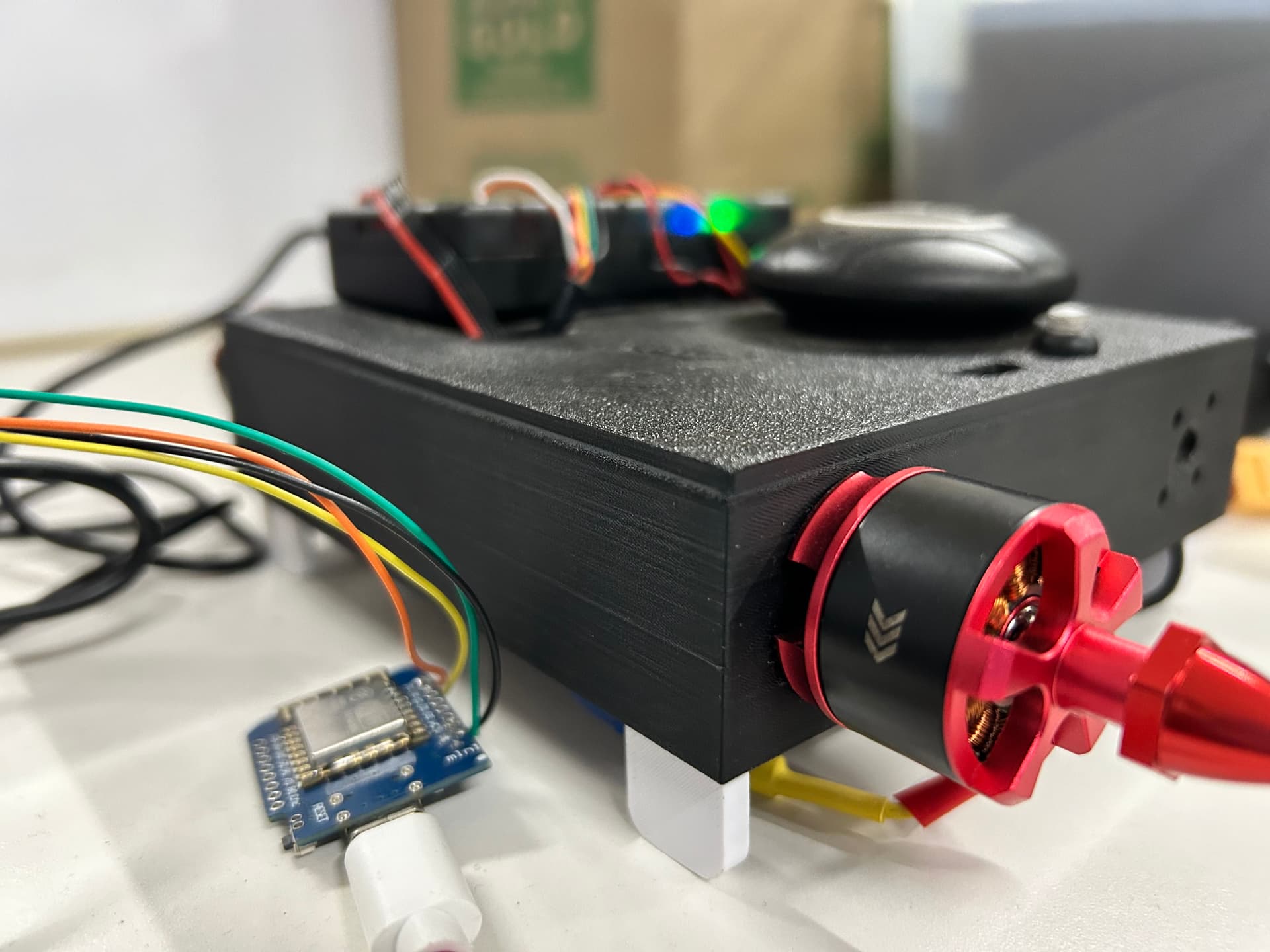
By using the above setup, I can arm & disarm and control left and right motors using Joystick controller.
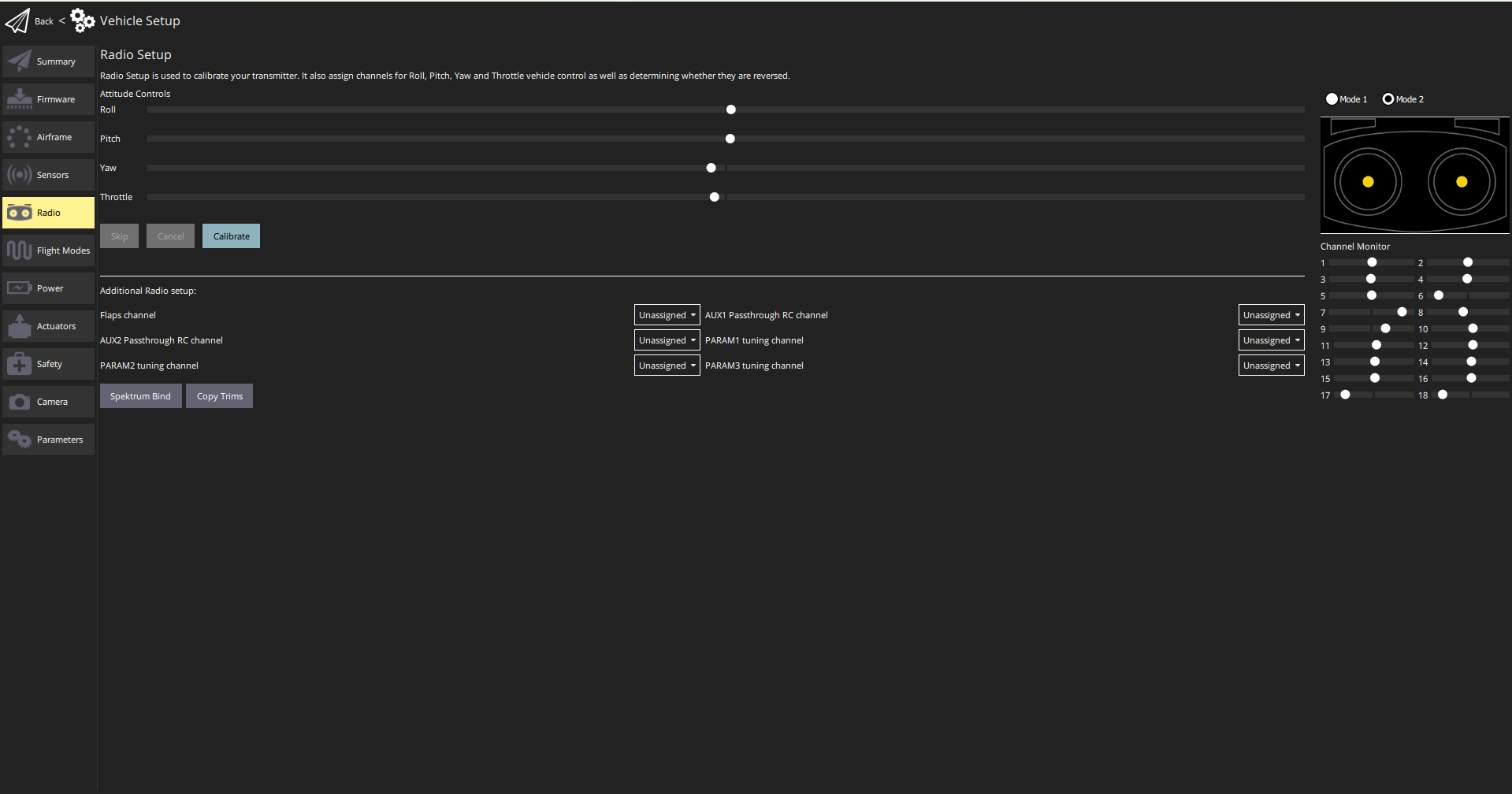
QGC Connection:
What we trying to do?
Here instead of Joystick we trying to control the project setup via web app. I established the connection between Pixhawk and server via webscoket (for data transfer between server and project setup). I can able to get the device info (GPS, motor and battery info) to webserver via custom code written in ESP 8266.
Problem Facing:
Same like, we trying to give input to arm & disarm and to control left and right motors. From the code written in ESP8266, cmd given to arm & disarm is working
CMD to arm and disarm:
arm command :
mavlink_msg_command_long_pack(
255, // System ID
190, // Component ID
&msg, // MAVLink message
1, // Target system ID (Pixhawk)
0, // Target component ID (all components)
MAV_CMD_COMPONENT_ARM_DISARM, // Command ID
0, // Confirmation
1, 0, 0, 0, 0, 0, 0 // Parameters (1 to arm)
);
disarm command :
mavlink_msg_command_long_pack(
255, // System ID
190, // Component ID
&msg, // MAVLink message
1, // Target system ID (Pixhawk)
0, // Target component ID (all components)
MAV_CMD_COMPONENT_ARM_DISARM, // Command ID
0, // Confirmation
0, 0, 0, 0, 0, 0, 0 // Parameters (0 to disarm)
);
but the cmd to control the left and right motors are not accepted by the kit.
CMD to run motors:
mavlink_msg_command_long_pack(
255, 190, &msg,
1, 0,
MAV_CMD_DO_CHANGE_SPEED,
0,
MAV_MODE_FLAG_CUSTOM_MODE_ENABLED, MAV_MODE_MANUAL_ARMED, throttle, 0, 0, 0, 0
);
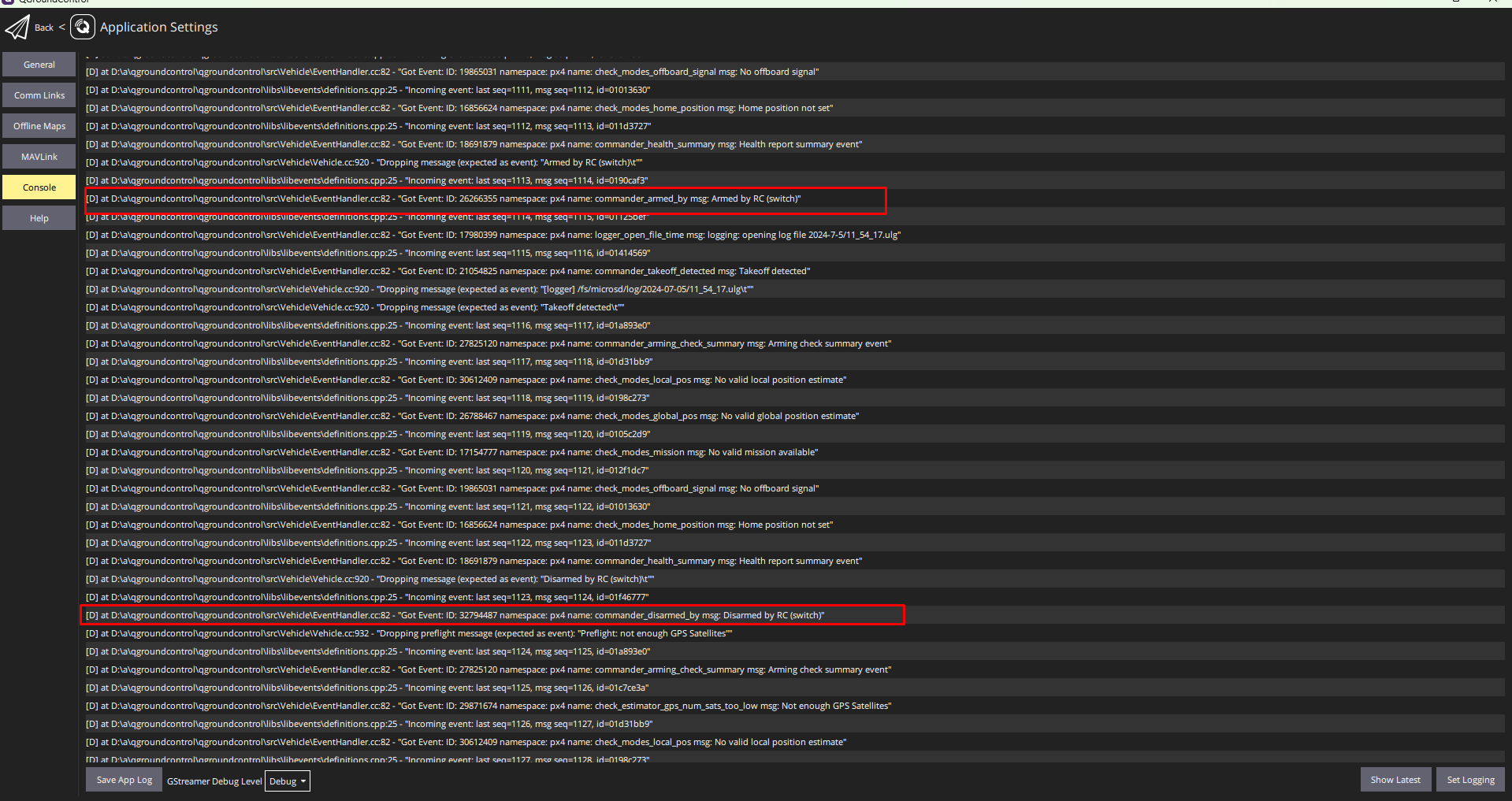
Please find the QGC logs:
I checked the QGroundControl (QGC) logs, which only show ‘arm’ and ‘disarm’ logs. There are no throttle or other command logs.
Questions:
- Can you confirm my libraries are correct ?
- What are the mavlink commands to control left and right motors ? - to spin front and back
- Is there is any alternative libraries to control whole devices ?
- Is there is any existing solution to control pixhawk and its connected device via web ?