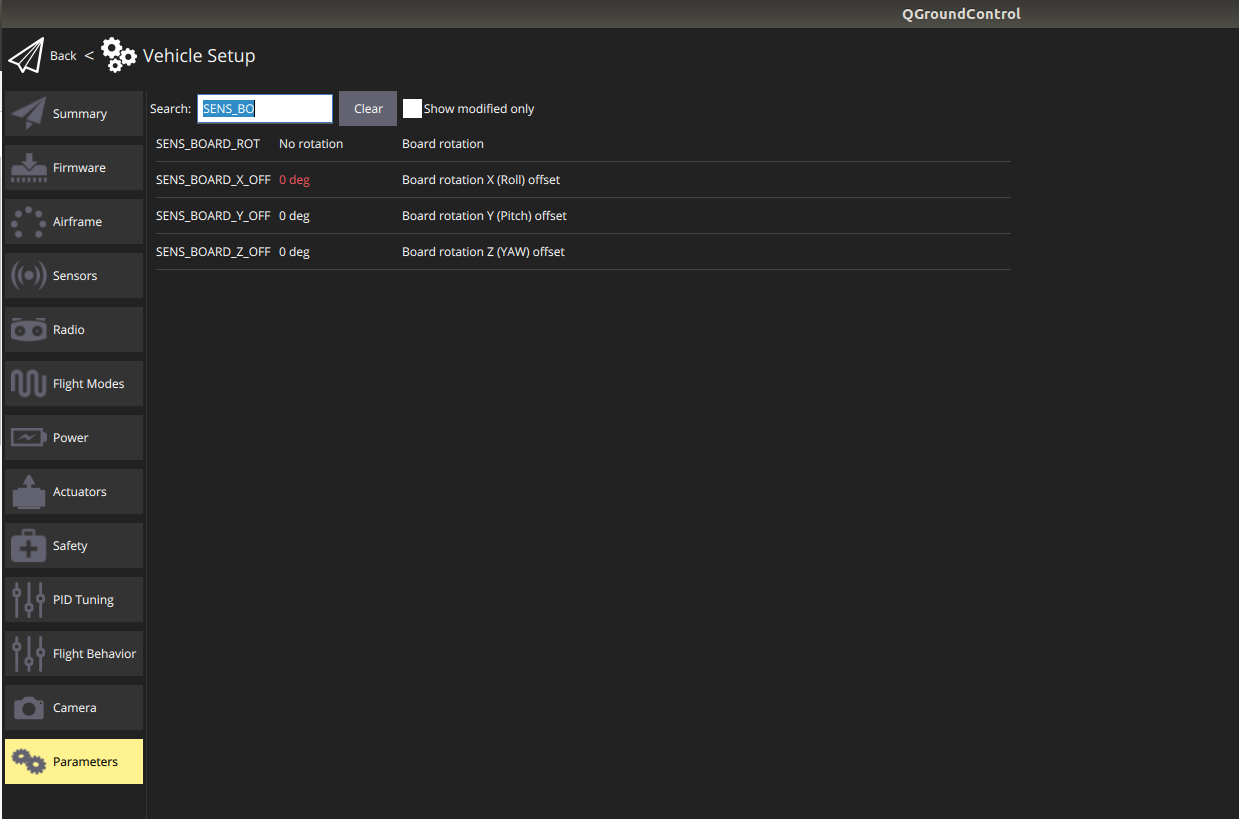
I tried to adjust the SENS_BOARD_ROT and it create a lot of vibration.
In the simulation, Iris drone even cannot take off, so I am worried to test this parameter in real world.
there are some reference the information:
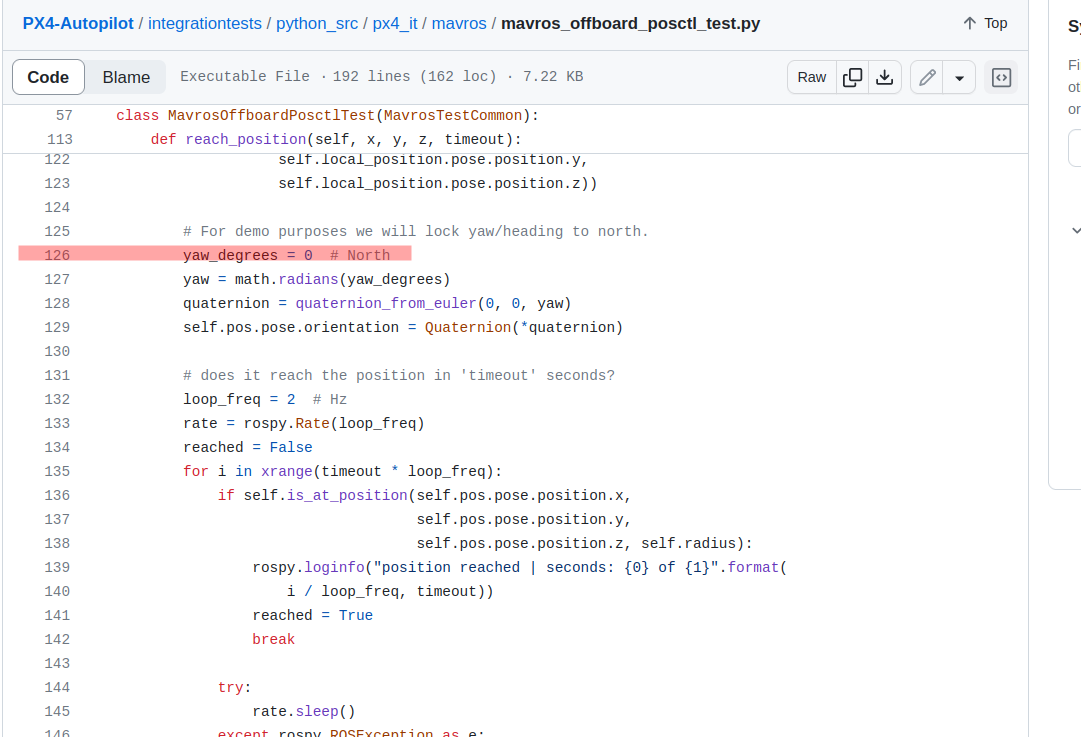
In the Pixhawk offboard control, the direction of self.pos.pose.position.x in the real world depends on how your Pixhawk flight controller is mounted on your vehicle and how you’ve set up your coordinate system. The Pixhawk itself does not inherently define a global coordinate system, so you will need to establish a reference frame for your specific application.
Here are the typical coordinate systems used in the context of Pixhawk and ROS (Robot Operating System) for aerial vehicles like drones:
ENU (East-North-Up):
In this system, the x-axis points east, the y-axis points north, and the z-axis points up.
If you use this coordinate system, self.pos.pose.position.x would represent the position of the vehicle along the east direction.
NED (North-East-Down):
In this system, the x-axis points north, the y-axis points east, and the z-axis points down.
If you use this coordinate system, self.pos.pose.position.x would represent the position of the vehicle along the north direction.
It’s essential to determine the coordinate system you are using and align your control commands and position references accordingly. Typically, when working with Pixhawk and MAVROS in ROS, the ENU coordinate system is often used. However, you should check your specific application or flight controller setup to confirm which coordinate system is being used.
If you are unsure about the coordinate system in use, you can do the following:
Check the Pixhawk configuration settings or documentation to see if it specifies the coordinate system.
Review the documentation for your specific flight software (e.g., ArduPilot or PX4) to understand the default coordinate system settings.
Experiment with small movements in different directions (e.g., send position setpoints and observe the vehicle's response) to determine the orientation of the axes.
Once you’ve determined the coordinate system, you can correctly interpret the direction of self.pos.pose.position.x in the real world based on that system.