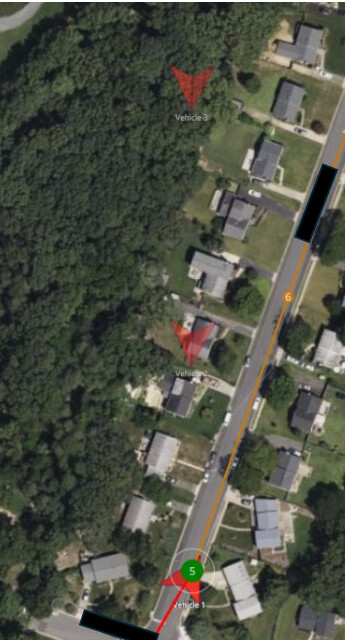
In my SITL simulation, I have 2 quadcopters both following another quadcopter. They seem to be following, but always offset to the north with a heading of due south. I’m able to set both their follow_me configs without issue.
See follow_me.Config source code to validate args.
How do I get my follower drone(s) to follow behind the leader node (match heading and follow exact same trajectory)?
conf1 = Config(
8.0, # follow_height_m
100.0, # follow_distance_m
0.05, # responsiveness
Config.FollowAltitudeMode.TARGET_GPS, # altitude_mode
0.1, # max_tangential_vel_m_s
45 # follow_angle_deg
)
await node1.follow_me.set_config(conf1)
await node1.follow_me.start()
conf2 = Config(
8.0, # follow_height_m
200.0, # follow_distance_m <------ CHANGED TO 2x TO SHOW FOLLOW CONFIG CLEARLY
0.05, # responsiveness
Config.FollowAltitudeMode.TARGET_GPS, # altitude_mode
0.1, # max_tangential_vel_m_s
45 # follow_angle_deg
)
await node2.follow_me.set_config(conf2)
await node2.follow_me.start()