Recently, I tried to add a camera in the same way on Ubuntu 20.04.
and then running DONT_RUN=1 make px4_sitl_default gazebo-classic in the PX4-autopilot.
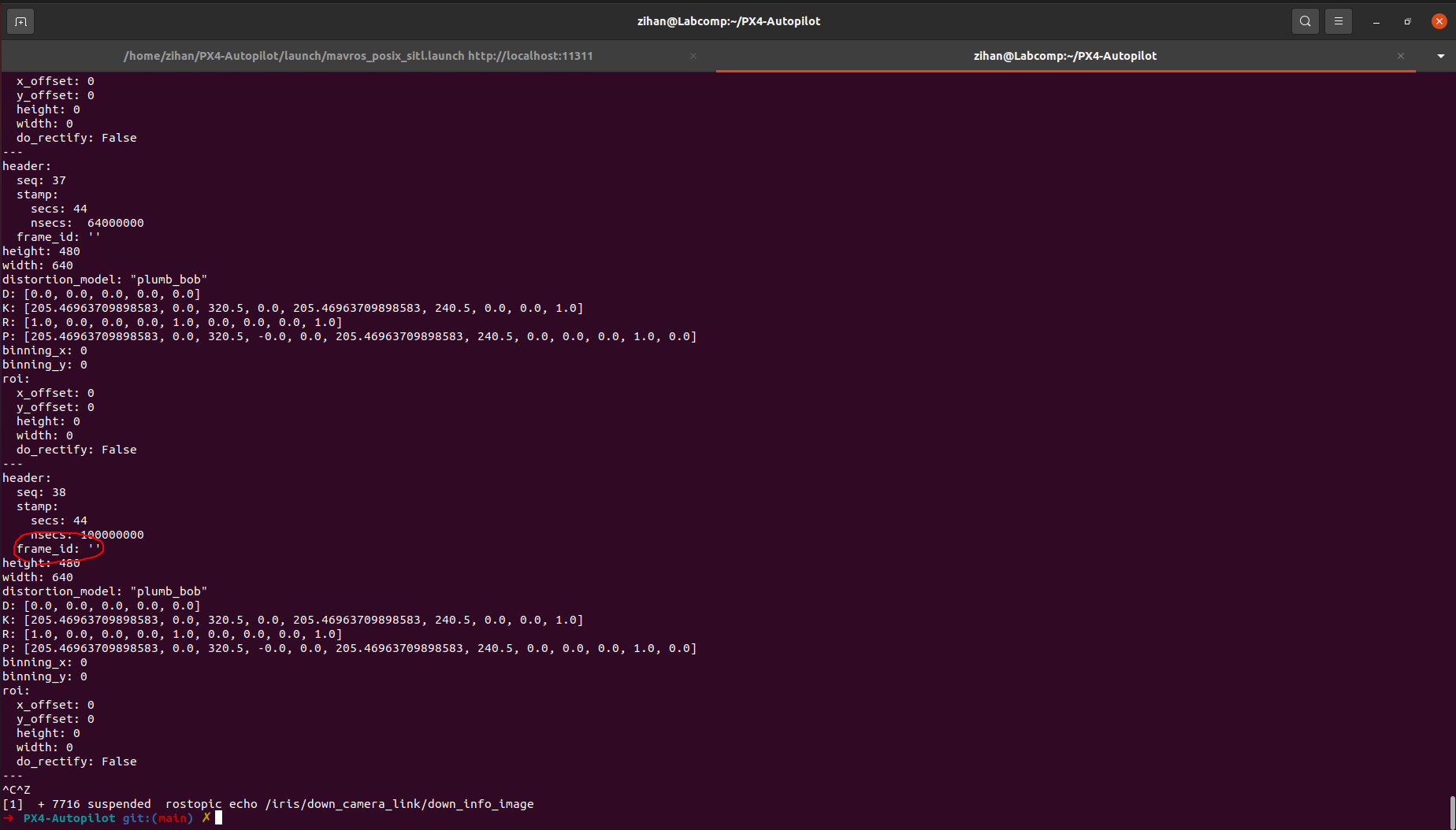
Although the camera is successfully added, the camera does not has “frame_id”.
Since it lacks “frame_id”, the ar_track_alvar package cannot work
In ubuntu 18.04, the frame_id is iris/