Hi there!
I’m trying to use a Hexacopter model which I’ve downloaded from Fuel and modified.
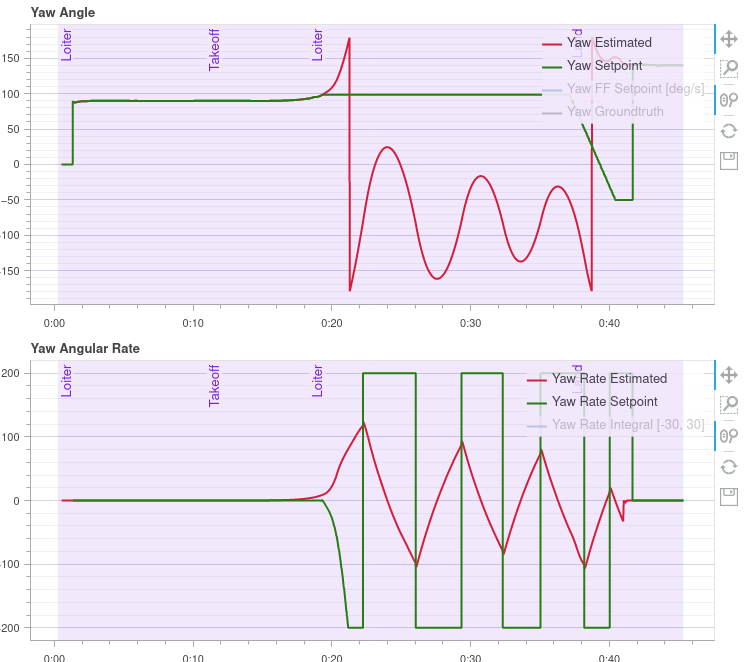
Once added the airframe, I can run a simulation in Gazebo Garden, but the copter keeps rotating with an oscillating yaw angle.
I can’t seem to understand why this is happening… Do you have any suggestions?
Here’s the modified sdf
<?xml version="1.0"?>
<sdf version="1.6">
<model name="X4">
<pose>0 0 0.121078 0 0 0</pose>
<link name="base_link">
<pose frame="">0 0 0 0 0 0</pose>
<inertial>
<pose frame="">0 0 0 0 0 0</pose>
<mass>3.42</mass>
<inertia>
<ixx>0.075</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.075</iyy>
<iyz>0</iyz>
<izz>0.148916</izz>
</inertia>
</inertial>
<collision name="base_link_inertia_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<box>
<size>0.3 0.3 0.25</size>
</box>
</geometry>
</collision>
<visual name="base_link_inertia_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/x4.dae</uri>
</mesh>
</geometry>
</visual>
<gravity>1</gravity>
<velocity_decay />
<self_collide>0</self_collide>
<sensor name="air_pressure_sensor" type="air_pressure">
<always_on>1</always_on>
<update_rate>50</update_rate>
<air_pressure>
<pressure>
<noise type="gaussian">
<mean>0</mean>
<stddev>0.01</stddev>
</noise>
</pressure>
</air_pressure>
</sensor>
<sensor name="imu_sensor" type="imu">
<always_on>1</always_on>
<update_rate>250</update_rate>
</sensor>
</link>
<link name="rotor_0">
<pose frame="">0.247 0.1506 0.028 0.087267 0 0.523599</pose>
<inertial>
<pose frame="">0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>8.13545e-05</iyy>
<iyz>0</iyz>
<izz>8.22545e-05</izz>
</inertia>
</inertial>
<collision name="rotor_0_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.1397</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="rotor_0_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/neo11_propeller_ccw.dae</uri>
</mesh>
</geometry>
<material>
<diffuse>1 0 0 1</diffuse>
<script>
<name>Gazebo/Red</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
<cast_shadows>0</cast_shadows>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name="rotor_0_joint" type="revolute">
<child>rotor_0</child>
<parent>base_link</parent>
<axis>
<xyz>0.043578 -0.075479 0.996195</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin filename="gz-sim-multicopter-motor-model-system"
name="gz::sim::systems::MulticopterMotorModel">
<jointName>rotor_0_joint</jointName>
<linkName>rotor_0</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1000.0</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.016</momentConstant>
<commandSubTopic>command/motor_speed</commandSubTopic>
<motorNumber>2</motorNumber>
<rotorDragCoefficient>8.06428e-05</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
<motorType>velocity</motorType>
</plugin>
<link name="rotor_1">
<pose frame="">-0.00067 0.28929 0.028 0 -0.087267 0</pose>
<inertial>
<pose frame="">0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>8.13545e-05</iyy>
<iyz>0</iyz>
<izz>8.22545e-05</izz>
</inertia>
</inertial>
<collision name="rotor_1_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.1397</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="rotor_1_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/neo11_propeller_cw.dae</uri>
</mesh>
</geometry>
<material>
<diffuse>0 0 1 1</diffuse>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
<cast_shadows>0</cast_shadows>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name="rotor_1_joint" type="revolute">
<child>rotor_1</child>
<parent>base_link</parent>
<axis>
<xyz>-0.087156 0 0.996195</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin filename="gz-sim-multicopter-motor-model-system"
name="gz::sim::systems::MulticopterMotorModel">
<jointName>rotor_1_joint</jointName>
<linkName>rotor_1</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1000.0</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.016</momentConstant>
<commandSubTopic>command/motor_speed</commandSubTopic>
<motorNumber>1</motorNumber>
<rotorDragCoefficient>8.06428e-05</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
<motorType>velocity</motorType>
</plugin>
<link name="rotor_2">
<pose frame="">-0.2501 0.1454 0.028 0.087267 -0 2.61799</pose>
<inertial>
<pose frame="">0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>8.13545e-05</iyy>
<iyz>0</iyz>
<izz>8.22545e-05</izz>
</inertia>
</inertial>
<collision name="rotor_2_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.1397</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="rotor_2_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/neo11_propeller_ccw.dae</uri>
</mesh>
</geometry>
<material>
<diffuse>0 0 1 1</diffuse>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
<cast_shadows>0</cast_shadows>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name="rotor_2_joint" type="revolute">
<child>rotor_2</child>
<parent>base_link</parent>
<axis>
<xyz>0.043578 0.075479 0.996195</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin filename="gz-sim-multicopter-motor-model-system"
name="gz::sim::systems::MulticopterMotorModel">
<jointName>rotor_2_joint</jointName>
<linkName>rotor_2</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1000.0</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.016</momentConstant>
<commandSubTopic>command/motor_speed</commandSubTopic>
<motorNumber>5</motorNumber>
<rotorDragCoefficient>8.06428e-05</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
<motorType>velocity</motorType>
</plugin>
<link name="rotor_3">
<pose frame="">-0.2501 -0.1454 0.028 -0.087267 -0 -2.61799</pose>
<inertial>
<pose frame="">0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>8.13545e-05</iyy>
<iyz>0</iyz>
<izz>8.22545e-05</izz>
</inertia>
</inertial>
<collision name="rotor_3_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.1397</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="rotor_3_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/neo11_propeller_cw.dae</uri>
</mesh>
</geometry>
<material>
<diffuse>0 0 1 1</diffuse>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
<cast_shadows>0</cast_shadows>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name="rotor_3_joint" type="revolute">
<child>rotor_3</child>
<parent>base_link</parent>
<axis>
<xyz>0.043578 -0.075479 0.996195</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin filename="gz-sim-multicopter-motor-model-system"
name="gz::sim::systems::MulticopterMotorModel">
<jointName>rotor_3_joint</jointName>
<linkName>rotor_3</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1000.0</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.016</momentConstant>
<commandSubTopic>command/motor_speed</commandSubTopic>
<motorNumber>3</motorNumber>
<rotorDragCoefficient>8.06428e-05</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
<motorType>velocity</motorType>
</plugin>
<link name="rotor_4">
<pose frame="">-0.00067 -0.28929 0.028 -0 0.087267 -3.14159</pose>
<inertial>
<pose frame="">0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>8.13545e-05</iyy>
<iyz>0</iyz>
<izz>8.22545e-05</izz>
</inertia>
</inertial>
<collision name="rotor_4_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.1397</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="rotor_4_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/neo11_propeller_ccw.dae</uri>
</mesh>
</geometry>
<material>
<diffuse>0 0 1 1</diffuse>
<script>
<name>Gazebo/Blue</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
<cast_shadows>0</cast_shadows>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name="rotor_4_joint" type="revolute">
<child>rotor_4</child>
<parent>base_link</parent>
<axis>
<xyz>-0.087156 -0 0.996195</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin filename="gz-sim-multicopter-motor-model-system"
name="gz::sim::systems::MulticopterMotorModel">
<jointName>rotor_4_joint</jointName>
<linkName>rotor_4</linkName>
<turningDirection>cw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1000.0</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.016</momentConstant>
<commandSubTopic>command/motor_speed</commandSubTopic>
<motorNumber>0</motorNumber>
<rotorDragCoefficient>8.06428e-05</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
<motorType>velocity</motorType>
</plugin>
<link name="rotor_5">
<pose frame="">0.247 -0.1506 0.028 -0.087267 0 -0.523599</pose>
<inertial>
<pose frame="">0 0 0 0 -0 0</pose>
<mass>0.005</mass>
<inertia>
<ixx>9.75e-07</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>8.13545e-05</iyy>
<iyz>0</iyz>
<izz>8.22545e-05</izz>
</inertia>
</inertial>
<collision name="rotor_5_collision">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<cylinder>
<length>0.005</length>
<radius>0.1397</radius>
</cylinder>
</geometry>
<surface>
<contact>
<ode/>
</contact>
<friction>
<ode/>
</friction>
</surface>
</collision>
<visual name="rotor_5_visual">
<pose frame="">0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://X4/meshes/neo11_propeller_cw.dae</uri>
</mesh>
</geometry>
<material>
<diffuse>1 0 0 1</diffuse>
<script>
<name>Gazebo/Red</name>
<uri>file://media/materials/scripts/gazebo.material</uri>
</script>
</material>
<cast_shadows>0</cast_shadows>
</visual>
<gravity>1</gravity>
<velocity_decay/>
</link>
<joint name="rotor_5_joint" type="revolute">
<child>rotor_5</child>
<parent>base_link</parent>
<axis>
<xyz>0.043578 0.075479 0.996195</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<plugin filename="gz-sim-multicopter-motor-model-system"
name="gz::sim::systems::MulticopterMotorModel">
<jointName>rotor_5_joint</jointName>
<linkName>rotor_5</linkName>
<turningDirection>ccw</turningDirection>
<timeConstantUp>0.0125</timeConstantUp>
<timeConstantDown>0.025</timeConstantDown>
<maxRotVelocity>1000.0</maxRotVelocity>
<motorConstant>8.54858e-06</motorConstant>
<momentConstant>0.016</momentConstant>
<commandSubTopic>command/motor_speed</commandSubTopic>
<motorNumber>4</motorNumber>
<rotorDragCoefficient>8.06428e-05</rotorDragCoefficient>
<rollingMomentCoefficient>1e-06</rollingMomentCoefficient>
<rotorVelocitySlowdownSim>10</rotorVelocitySlowdownSim>
<motorType>velocity</motorType>
</plugin>
</model>
</sdf>
and this is the airframe file
#!/bin/sh
#
# @name OpenRobotics X4
#
# @type Hexarotor x
#
. ${R}etc/init.d/rc.mc_defaults
PX4_SIMULATOR=${PX4_SIMULATOR:=gz}
PX4_GZ_WORLD=${PX4_GZ_WORLD:=default}
PX4_SIM_MODEL=${PX4_SIM_MODEL:=X4}
param set-default SIM_GZ_EN 1
param set-default SENS_EN_GPSSIM 1
param set-default SENS_EN_BAROSIM 0
param set-default SENS_EN_MAGSIM 1
param set-default MAV_TYPE 13
param set-default CA_AIRFRAME 0
param set-default CA_ROTOR_COUNT 6
# Rotors
# SDF and Airframe have different reference frames!
param set-default CA_ROTOR0_PX -0.00067
param set-default CA_ROTOR0_PY 0.28929
param set-default CA_ROTOR0_KM -0.05 # CW
param set-default CA_ROTOR1_PX -0.00067
param set-default CA_ROTOR1_PY -0.28929
param set-default CA_ROTOR1_KM 0.05 # CCW
param set-default CA_ROTOR2_PX 0.247
param set-default CA_ROTOR2_PY -0.1506
param set-default CA_ROTOR2_KM -0.05 # CW
param set-default CA_ROTOR3_PX -0.2501
param set-default CA_ROTOR3_PY 0.1454
param set-default CA_ROTOR3_KM 0.05 # CCW
param set-default CA_ROTOR4_PX 0.247
param set-default CA_ROTOR4_PY 0.1506
param set-default CA_ROTOR4_KM 0.05 # CCW
param set-default CA_ROTOR5_PX -0.2501
param set-default CA_ROTOR5_PY -0.1454
param set-default CA_ROTOR5_KM -0.05 # CW
# Set actuators to some functions
param set-default SIM_GZ_EC_FUNC1 101
param set-default SIM_GZ_EC_FUNC2 102
param set-default SIM_GZ_EC_FUNC3 103
param set-default SIM_GZ_EC_FUNC4 104
param set-default SIM_GZ_EC_FUNC5 105
param set-default SIM_GZ_EC_FUNC6 106
# Min-Max throttle values
param set-default SIM_GZ_EC_MIN1 150
param set-default SIM_GZ_EC_MIN2 150
param set-default SIM_GZ_EC_MIN3 150
param set-default SIM_GZ_EC_MIN4 150
param set-default SIM_GZ_EC_MIN5 150
param set-default SIM_GZ_EC_MIN6 150
param set-default SIM_GZ_EC_MAX1 1000
param set-default SIM_GZ_EC_MAX2 1000
param set-default SIM_GZ_EC_MAX3 1000
param set-default SIM_GZ_EC_MAX4 1000
param set-default SIM_GZ_EC_MAX5 1000
param set-default SIM_GZ_EC_MAX6 1000
# Throttle % needed to hover
param set-default MPC_THR_HOVER 0.60