Hi,
I’m using pixhawk2.1 and px4.
http://www.proficnc.com/all-products/185-pixhawk2-suite.html
but hereflow interface is CAN and I cannot found parameter about CAN port on px4.
APM has supported this sensor since April 2019, but PX4 has no issues, so i ask.
Is there any way to control the Opticalflow using the CAN port?
If not, can you update this sensor to support it on px4?
2 Likes
ar1040
August 1, 2019, 5:07pm
2
I would also like to use this sensor. They claim incredible accuracy.
ealdaz
September 25, 2019, 4:38pm
3
I can see here that support is work in progress:
# PMW3901 Flow Sensor
PMW3901 is an [optical flow](../sensor/optical_flow.md) asic that computes the flow internally and provides a difference in pixels between
each frame over a SPI interface. It is basically a tracking sensor similar to what you would find in a computer mouse, but adapted to work between
80 mm and infinity. The sensor can be read at a frequency up to 100 Hz.

The following is a video of an S500 frame with a Pixhawk 4 and the Bitcraze PMW3901 flow deck. GPS was fully disabled in this test to see the real performance of the flow module.
!!!REPLACE WITH RIGHT VIDEO
{% youtube %}
https://youtu.be/0Jpq6DU_HVg
{% endyoutube %}
## Boards using PMW3901
The following table shows some of the boards available on the market with the pmw3901 optical flow sensor. The number interfaces, the number of sensors, the input voltage and the size are shown. The board name contains the link to where to buy the specific board.
Board | Interface | Flow | Range Finder | Gyro | Voltage (V) | Size (mm)
show original
I have uploaded the latest firmware and connected the HereFlow to my Pixhawk 2.1 (cube).
Has anyone managed to make this work? Would be very keen to test it
ealdaz
September 25, 2019, 4:44pm
4
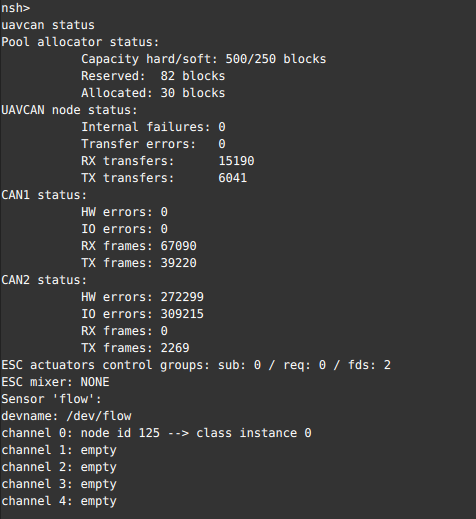
In case it helps the command uavcan status produces this:
So it would seem that the flow device is detected, and has id 125
1 Like
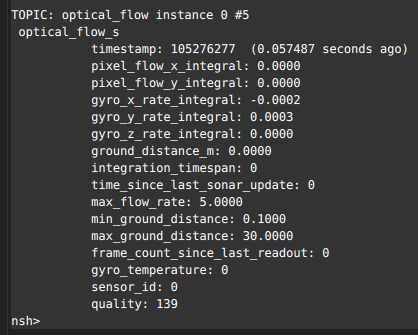
Now it can work under master branch. But the distance sensor does not have reading.
1 Like
henrik
January 16, 2020, 7:50pm
6
Hi!
How did you set it up? Like what kind of parameters did you set to make it work? I tried, but could not figure it out.
Thank you in advance.
How can we know when hereflow support will be available in the px4 group?
Does anyone know if there are any plans to also support the lidar range finder on the device?