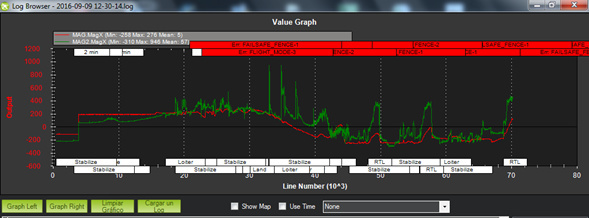
Recently I replaced my Arducopter with a pixhawk, I make all steps for calibrate. When I test the copter in field it becomes uncontrolable, I tried to fixed Loiter mode, but was unsuccessful,in the copter start to move right when all the sticks was in mid posistion(except throtle, it was 46%). Besides fence failsafe was active and I don´t noted it.2016-09-09 12-30-14.rar.pdf (1.5 MB)
please remove .pdf to check the log.