Good morning everyone
I am currently working on the main branch of the PX4 Firmware, and I am doing simulation studies in Gazebo Classic with the Iris quadrotor.
When using the main version, I am experiencing bad behaviors in the height estimations during my simulations. In particular, even if the quadrotor has not performed takeoff yet, the height and velocity estimates on Z start to diverge, in particular, I saw in each simulation an error range of 1.50 meters (both negative and positive), and 0.40 m/s error for the velocity.
When launching the simulation, some warnings appear, as can be seen in the picture I send you here.
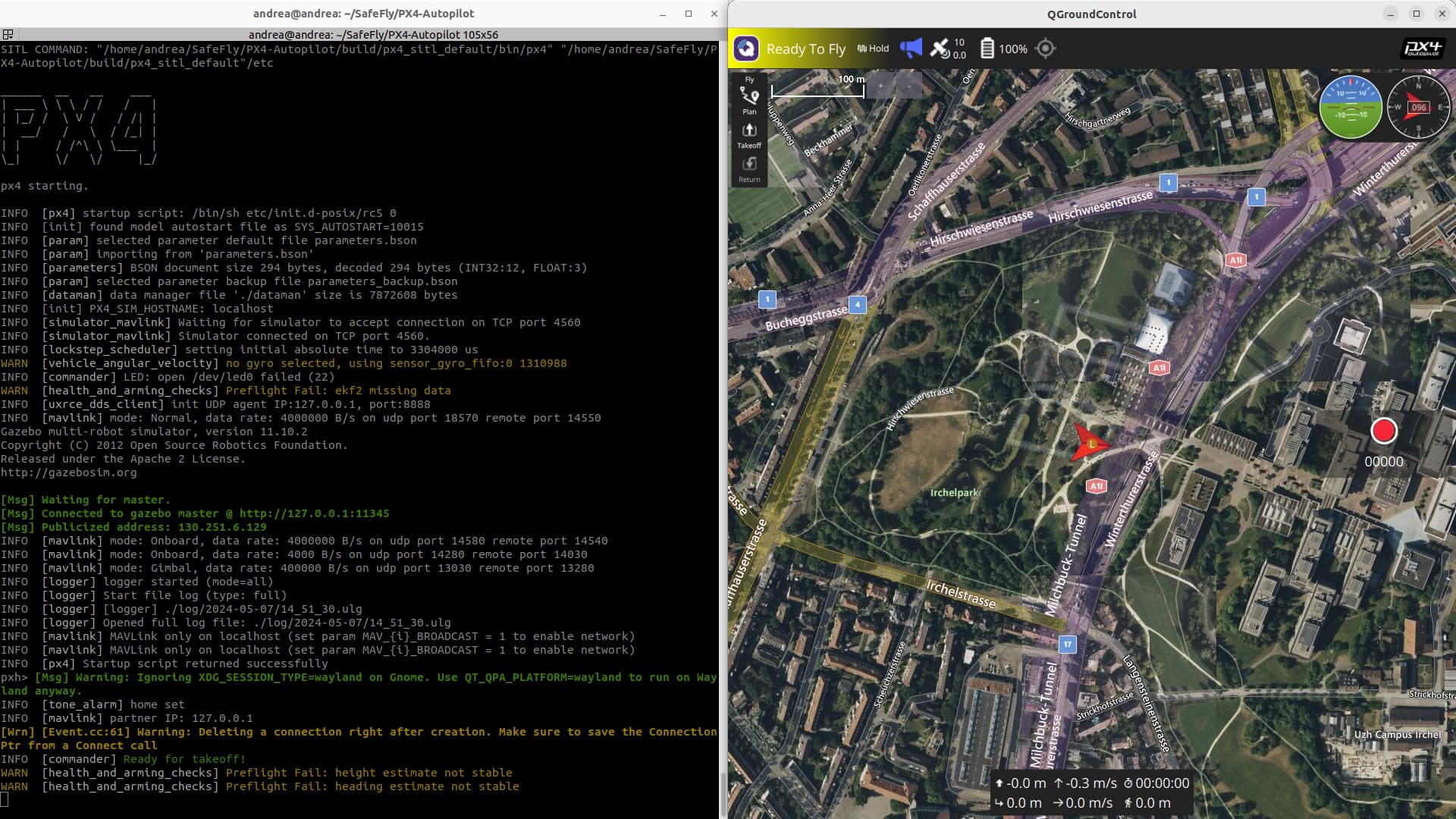
It seems like something is not initialized properly for the EKF, but I cannot figure out which files to modify and/or what to edit to make it work properly.
If it can help, when initializing a simulation with the v1.13.2 version, this does not happen. I also tried with the 1.14.2 and this does not happen, but still having the “EKF2 missing data” warning.
Did someone have a hint on how to solve this?
Thank you.
