I’m flying an mRo PixRacer R14 with an mRo uGPS ublox SAM MAQ (mRo uGPS ublox SAM M8Q [Retired]), and the Estimated position keeps returning to the home location during flight.
For a typical example, see this flight log: Flight Review
I’ve seen similar things happening with an mRo GPS u-Blox Neo-M8N + HMC5983, but I don’t have any logs for that handy. They basically look the same, even though the vehicles themselves are totally different.
I’ve checked wiring, and have tinkered with adding caps, etc. to try and squash noise. The only thing I haven’t tried is running the whole FMU system on an isolated power supply, which seems extreme…
The plot of the raw GPS positions looks already unusable, so you have a problem with your GPS hardware and this has nothing to do with PX4. Either the mounting or the electronics or interference cause this.
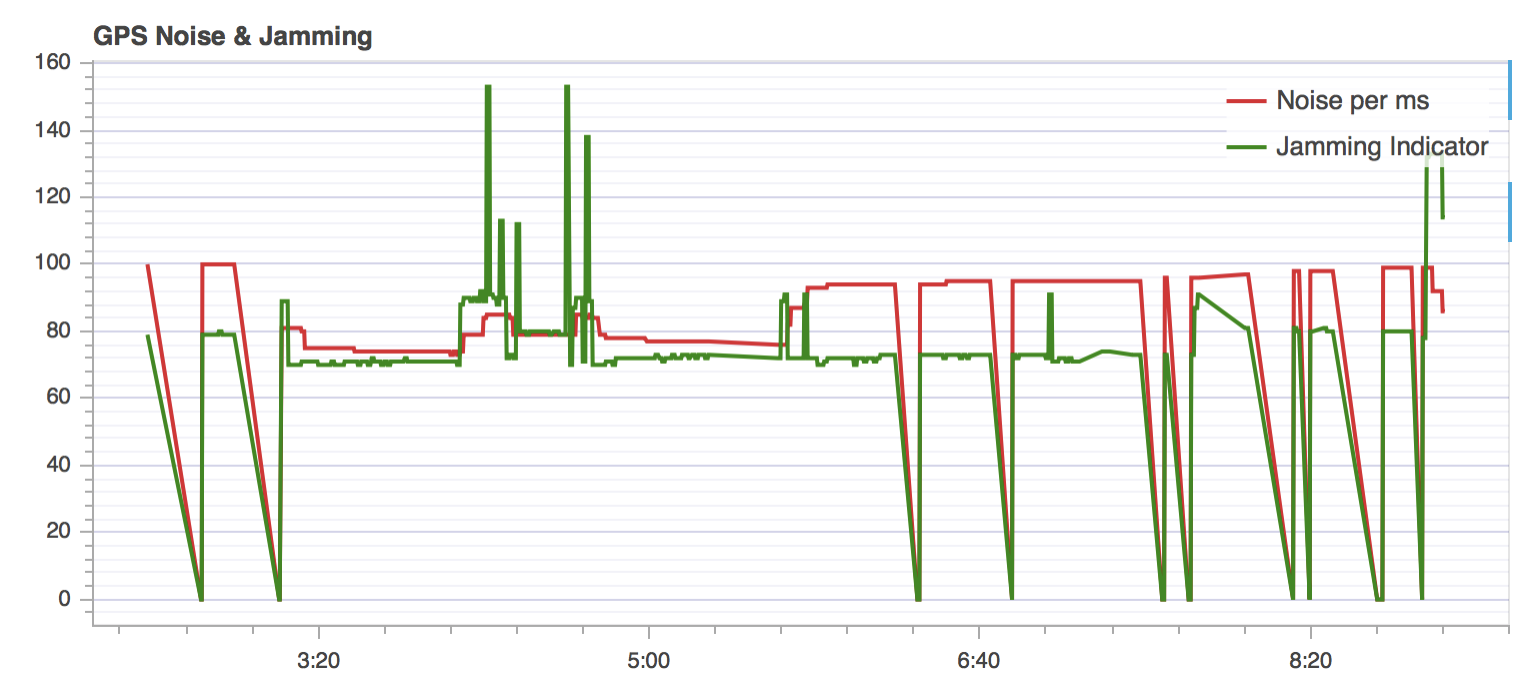
Looking at the jamming plot that is your most likely problem. There is nothing in software that you can do to fix this - you need to stop the electromagnetic interference garbling the GPS signal reception.
What are acceptable units for noise-per-ms and jamming-indicator in a functional system?
After further inspection, I’m now greatly suspicious of my GPS connector. As soon as I get that fixed, I’ll let you know if the problem still hasn’t gone away.