Hi all,
We have been using RTK GPS for a while now (running PX4 1.13.3 stable version), and we can achieve centimeter level accuracy (eph and epv values) with the raw GPS signal. However the fused global position does not get near this accuracy, unless we do some (not very intuitive workaround). What I mean is that although EKF2_GPS_P_NOISE and EKF2_GPS_V_NOISE are set to the expected gps accuracy (according to this), the global position’s accuracy is “stuck” at around a meter.
With some investigations, I found that setting EKF2_REQ_GPS_H parameter to around 1-3 minutes (originally 10 seconds) will make the global position accuracy reach RTK level.
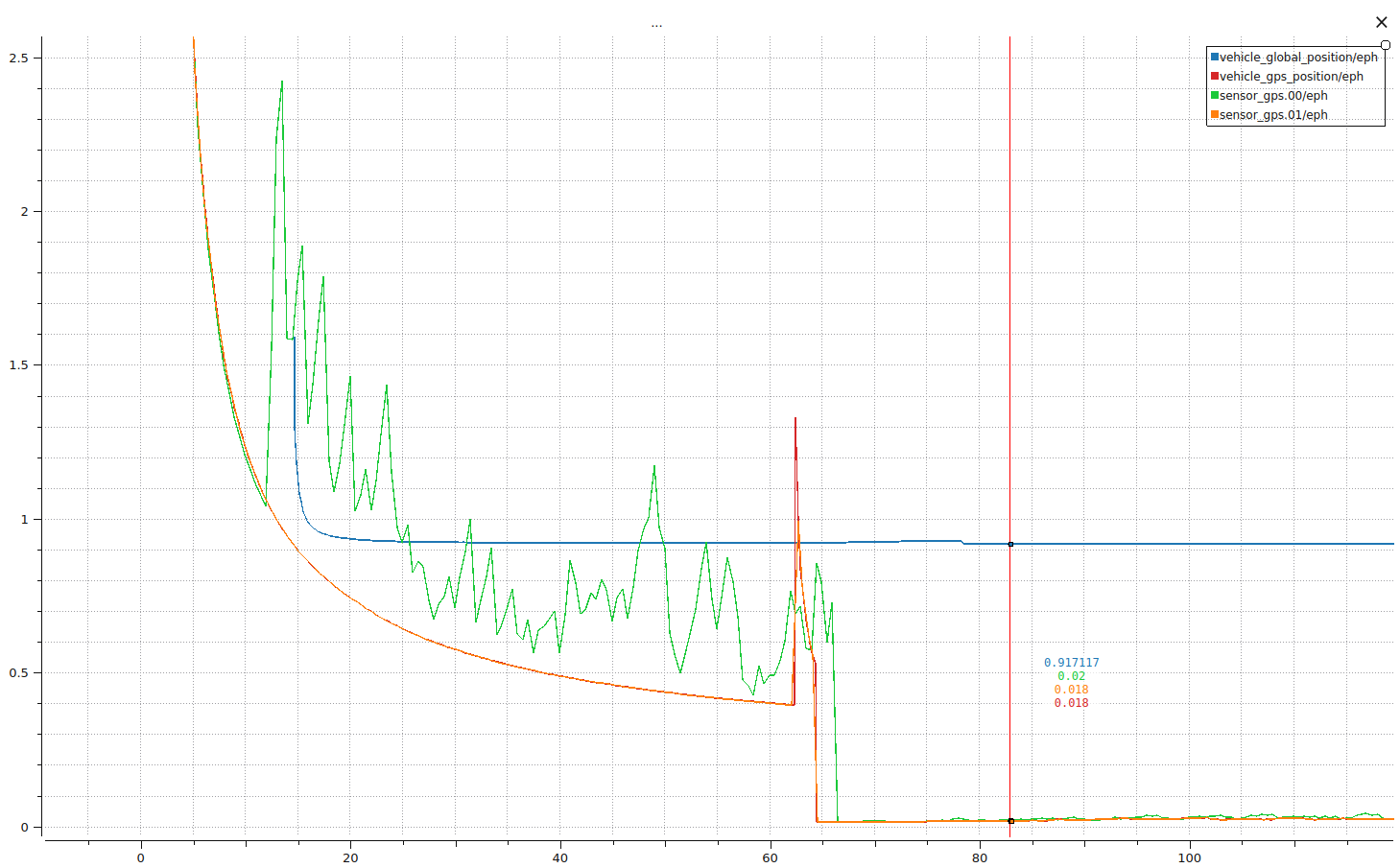
From the flightlogs it seems that the global position accuracy is “stuck” on the level where the gps was when the position estimation(/fusion) started/stabilized, and does not follow the gps accuracy. See the screenshot of the log:
Is that the intended behavior? It seems rather counter-intuitive, that with the gps getting more accurate, the fused position (using the gps) does not. Or is there some other settings to tune?
For reference, here are some other parameters set, that might be related:
EKF2_HGT_MODE 1 (use gps for altitude estimation instead of barometer)
EKF2_AID_MASK 129 (use GPS and GPS heading fusion)
A bit extra info, restarting the ekf2 module from the nsh> console make the global position accuracy converge to the momentary gps accuracy at the time of restart. I suppose this is expected, but just to show that it is the estimator’s startup where something strange is going on.
I had some similar issues, when I was Flying my VTOL with RTK which had an 0.4m accuracy, 2 minutes after Takeoff the RTK DGPS Lock (fixed) was gone and the UAV changed its flightpath, without QGC showing it, due to QGroundControl the UAV follows the mission plan,but in reality the UAV has glitched 4km away from the Mission Plan. Then I noticed the the Coordinates the RTK sends are right, but the FCU somehow messes it up. Can the be related to the issue you described?
@diana_diaz it could be that if the estimator trusted the gps position more, navigation failures like that would not happen. But it’s just a somewhat educated guess. I suppose it would not hurt, at least.
However my issue seems related to startup, and yours happening in-flight, so I think it has different rootcauses. We also experienced navigation loss in-flight (like this one), but rarely having an error in the range of kilometers. Could it be that your UAV thought it is “back at its base”? We have had that isue happening as well, but that included the GPS’s fix type to drop to 0, maybe that’s one thing to check (even though the gps coordinates seemed correct).