I’m working on a project where I heavily rely on the global positioning accuracy of a fixed wing UAV using PX4. As a first experiment, I wanted to measure the accuracy of the ekf while just letting the FCU rest outside. The setup consists of a PixHawk V5 and a GPS. Now I’d expect the GLOBAL_POSITION_INT to rest still, but the estimator shows a large positional deviation.


X Y Z
count 29999.000000 29999.000000 29999.000000
mean 7.440590 13.669577 -28.974474
std 2.791816 4.506730 0.780497
min 0.000000 0.000000 -30.597000
25% 5.271358 10.940513 -29.434000
50% 8.111515 14.009199 -28.804000
75% 9.315749 16.911112 -28.245000
max 12.663362 22.770522 -28.027000
East North Alt
count 29998.000000 29998.000000 29998.000000
mean 7.557960 13.778649 496.064016
std 2.811163 4.516370 8.948092
min 0.000000 0.000000 477.336644
25% 5.405080 11.052309 489.652513
50% 8.212542 14.097385 495.278635
75% 9.469409 17.045709 501.990400
max 12.911135 22.857498 516.523996
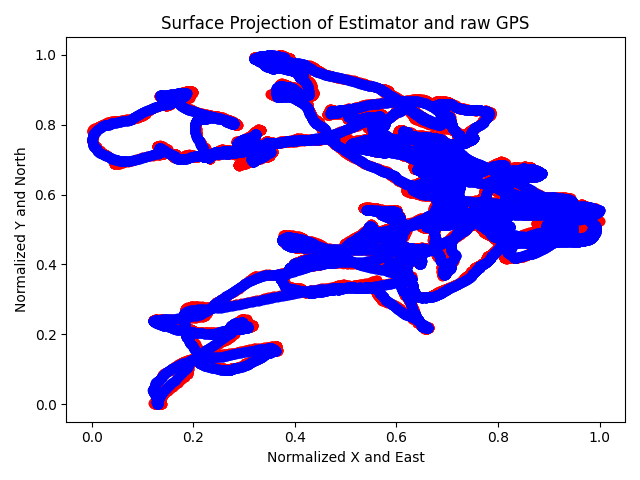
I realised that the estimator outputs nearly the same values as my raw gps for horizontal input. Which indicates that the ekf is not making use of additional sensor fusion, is this assumption correct? Further, is this kind of GPS deviation considered normal, as there is a max. 35m difference within this measurement? Am I missing some kind of tuning for the ekf?
Thanks a lot, I appreciate any kind of input!