Hello everyone, I’m Josh, and I’m excited to share my latest project with you – the Firmament Autopilot (FMT). I’ve dedicated 8 years to developing this autopilot system, and I’m thrilled to introduce it to the Dronecode and PX4 communities.
The FMT journey began in 2016 as a hobby project, setting it apart from other systems like PX4/APM. What makes FMT unique is its implementation through Model-Based Design (MBD) methodology. In this approach, all algorithms, from Inertial Navigation System (INS) and controllers to state machines and vehicle plant, are meticulously crafted in Simulink and can be seamlessly translated into efficient C/C++ code.
The FMT project primarily consists of three subprojects:
- FMT-Firmware: This encompasses the embedded software framework for the flight controller, including the core software, drivers, and functional modules.
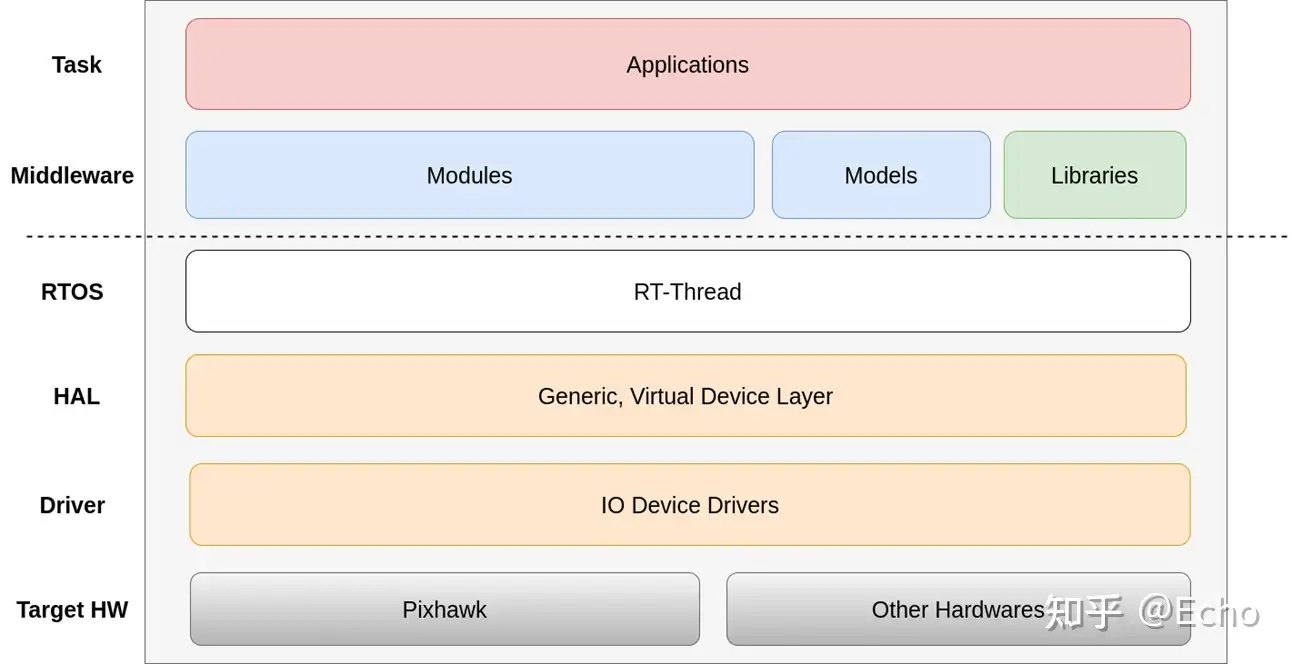
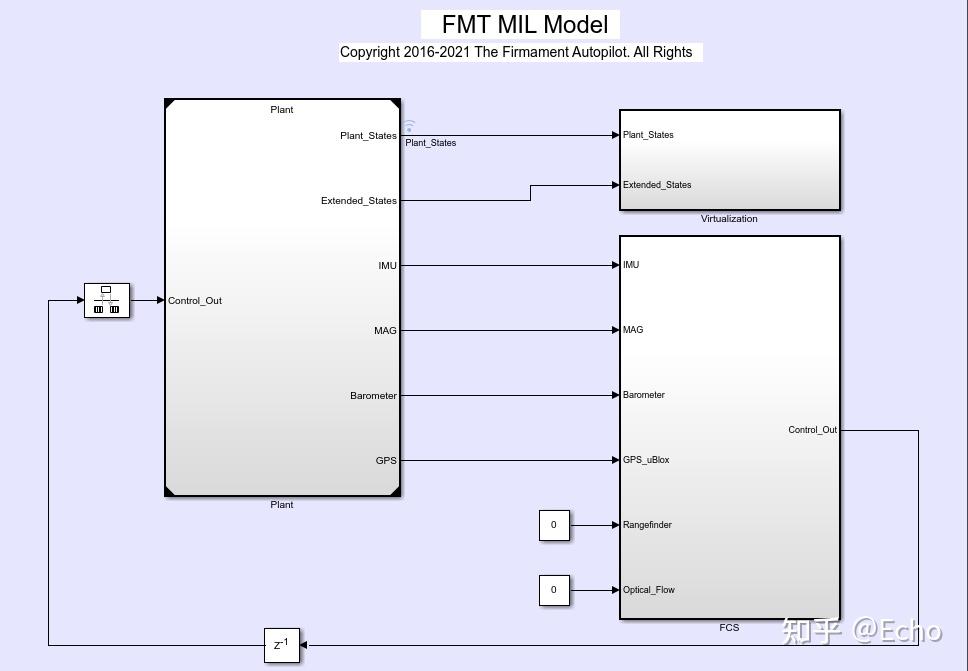
- FMT-Model:This is the framework for flight control algorithm models. It includes algorithm models implemented using Matlab/Simulink, such as navigation, control, state machines, and controlled object models. These algorithm models can be automatically generated into code and integrated into FMT-Firmware, thereby forming a complete flight control system software.
- FMT-Sim (under development): This component is based on a 3D engine and provides a simulation environment with realistic rendering effects and rich simulation scenarios.

FMT currently supports with a variety of hardware, including Pixhawk 2.4.6, Pixhawk 4, CUAV V5+, HEX Cubeorange, and our in-house designed ICF5.

In terms of vehicles, FMT currently provides support for both Multicopter and Fixed-wing types. Additionally, compatibility for other vehicle types such as VTOL, Rover, Boat, and Airship is currently in development. Since FMT is an open-source platform, you also have the flexibility to design and implement your own algorithm models, enabling FMT to cater to the specific requirements of your unique vehicle.

If you’re interested, you can get the source code on our GitHub repository at Firmament-Autopilot. The documentation is also accessible at Document, providing valuable insights into FMT.