Hi everyone!
I am using a virtual machine running ubuntu-20.04 environment, hosted on a Windows 10 system.
I want to run a simulation before starting my real flight.
So I followed the PX4 Installation to install the FlightGear Simulation (Ubuntu Linux).
I use “fgfs --launcher” to check the installation. FlightGear lanched successfully.
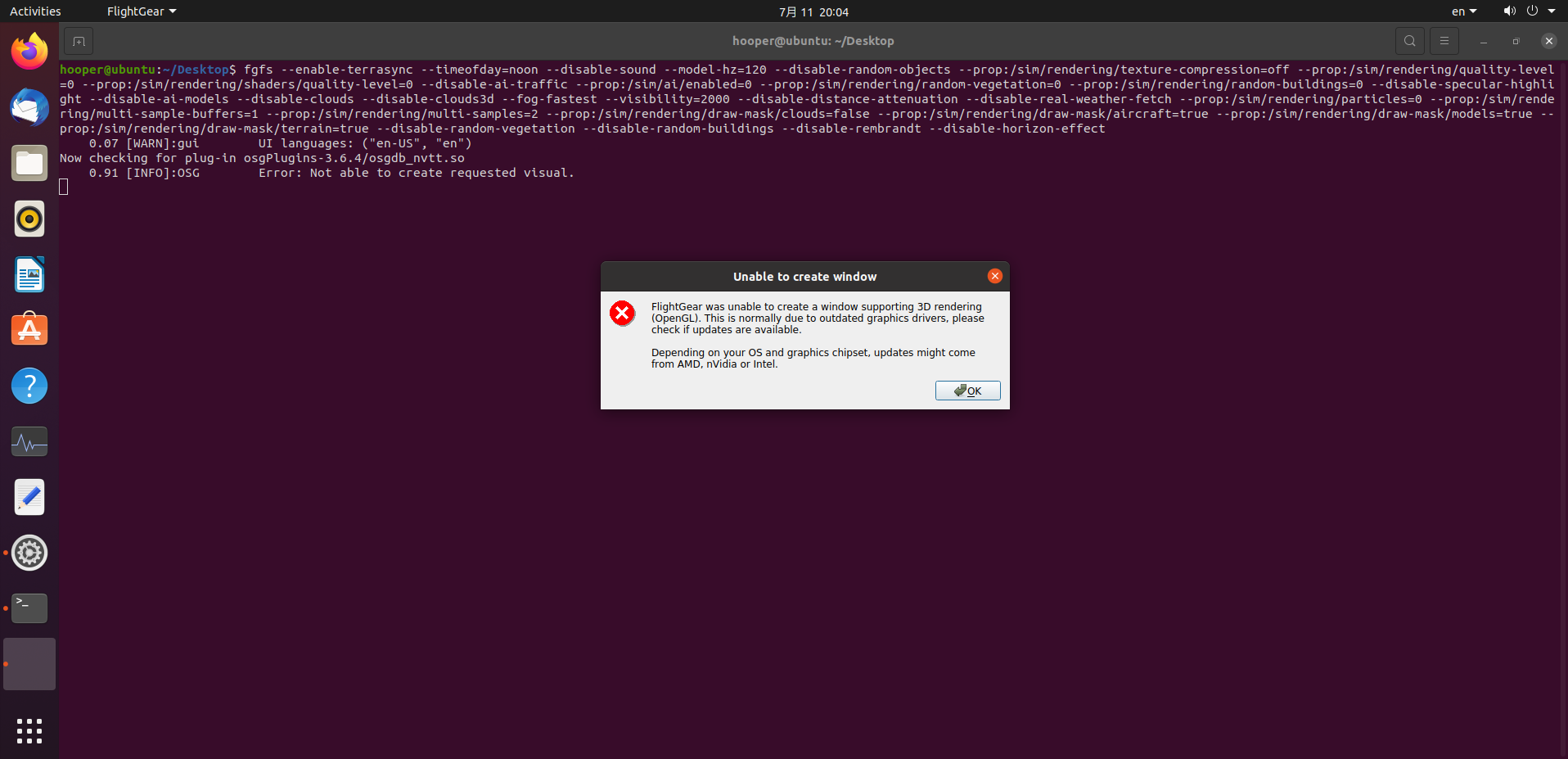
But, when i use “make px4_sitl_nolockstep flightgear_rascal” to lanch FlightGear, it failed.
The message box shows that “FlightGear was unable to create a window supporting 3D rendering(OpenGL)”.
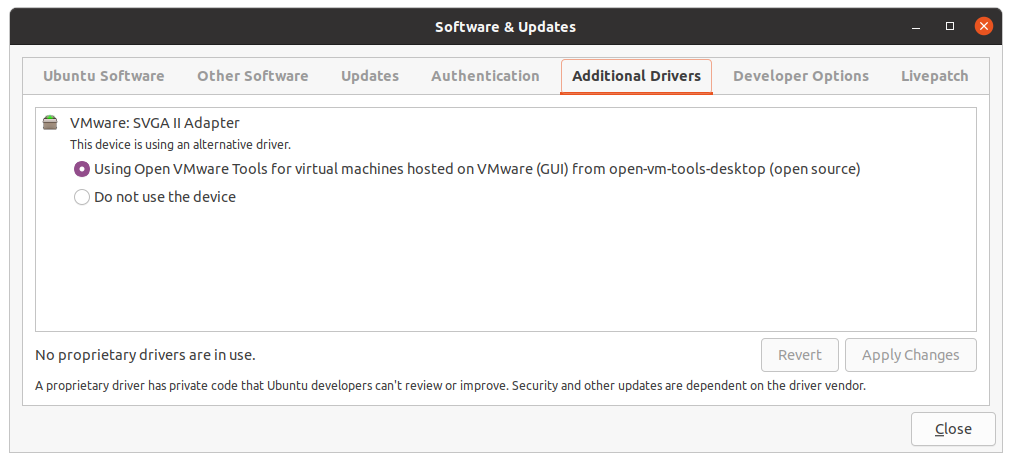
I checked Graphic card and the driver. It is “VMware:SVGA II Adapter”, and the driver is “Open VMWare Tools for virtual machines hosted on VMware(GUI)” from open-vm-tools-desktop.
The console output as follow.
hooper@ubuntu:~/px4/Firmware$ make px4_sitl_nolockstep flightgear_rascal
[0/4] Performing build step for 'flightgear_bridge'
ninja: no work to do.
[3/4] cd /home/hooper/px4/Firmware/build/px4_sitl_nolockstep/tmp && /home/hooper/px4/Firmware/Tools/...flightgear rascal none /home/hooper/px4/Firmware /home/hooper/px4/Firmware/build/px4_sitl_nolockstep
SITL ARGS
sitl_bin: /home/hooper/px4/Firmware/build/px4_sitl_nolockstep/bin/px4
debugger: none
program: flightgear
model: rascal
world: none
src_path: /home/hooper/px4/Firmware
build_path: /home/hooper/px4/Firmware/build/px4_sitl_nolockstep
FG setup
1.14 [WARN]:gui UI languages: ("zh-CN", "en")
None
Rascal110-YASim
https://github.com/ThunderFly-aerospace/FlightGear-Rascal/archive/master.zip
5 /controls/flight/aileron -1
7 /controls/flight/elevator -1
2 /controls/flight/rudder 1
4 /controls/engines/engine/throttle 1
fgfs --aircraft=Rascal110-YASim --fg-aircraft=./models --enable-terrasync --timeofday=noon --disable-sound --telnet=15400 --generic=socket,out,100,127.0.0.1,15200,udp,FGtoPX4 --generic=socket,in,100,,15300,udp,PX4toFG --model-hz=120 --disable-random-objects --prop:/sim/rendering/texture-compression=off --prop:/sim/rendering/quality-level=0 --prop:/sim/rendering/shaders/quality-level=0 --disable-ai-traffic --prop:/sim/ai/enabled=0 --prop:/sim/rendering/random-vegetation=0 --prop:/sim/rendering/random-buildings=0 --disable-specular-highlight --disable-ai-models --disable-clouds --disable-clouds3d --fog-fastest --visibility=2000 --disable-distance-attenuation --disable-real-weather-fetch --prop:/sim/rendering/particles=0 --prop:/sim/rendering/multi-sample-buffers=1 --prop:/sim/rendering/multi-samples=2 --prop:/sim/rendering/draw-mask/clouds=false --prop:/sim/rendering/draw-mask/aircraft=true --prop:/sim/rendering/draw-mask/models=true --prop:/sim/rendering/draw-mask/terrain=true --disable-random-vegetation --disable-random-buildings --disable-rembrandt --disable-horizon-effect & echo $! > /tmp/px4fgfspid_0
SITL COMMAND: "/home/hooper/px4/Firmware/build/px4_sitl_nolockstep/bin/px4" "/home/hooper/px4/Firmware/build/px4_sitl_nolockstep"/etc -s etc/init.d-posix/rcS -t "/home/hooper/px4/Firmware"/test_data
I'm Mavlink to FlightGear Bridge
Targed Bridge Freq: 200, send data every step: 1
4
5 -1
7 -1
2 1
4 1
INFO [px4] Creating symlink /home/hooper/px4/Firmware/build/px4_sitl_nolockstep/etc -> /home/hooper/px4/Firmware/build/px4_sitl_nolockstep/tmp/rootfs/etc
0.05 [WARN]:gui UI languages: ("zh-CN", "en")
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] Calling startup script: /bin/sh etc/init.d-posix/rcS 0
Info: found model autostart file as SYS_AUTOSTART=1033
Now checking for plug-in osgPlugins-3.6.4/osgdb_nvtt.so
INFO [param] selected parameter default file eeprom/parameters_1033
INFO [parameters] BSON document size 437 bytes, decoded 437 bytes
[param] Loaded: eeprom/parameters_1033
INFO [dataman] Unknown restart, data manager file './dataman' size is 11798680 bytes
PX4 SIM HOST: localhost
INFO [simulator] Waiting for simulator to accept connection on TCP port 4560
INFO [simulator] Simulator connected on TCP port 4560.
INFO [commander] LED: open /dev/led0 failed (22)
INFO [init] Mixer: etc/mixers-sitl/plane_sitl.main.mix on /dev/pwm_output0
INFO [airspeed_selector] No airspeed sensor detected. Switch to non-airspeed mode.
INFO [airspeed_selector] Airspeed estimation invalid
INFO [mavlink] mode: Normal, data rate: 4000000 B/s on udp port 18570 remote port 14550
INFO [mavlink] mode: Onboard, data rate: 4000000 B/s on udp port 14580 remote port 14540
INFO [mavlink] mode: Onboard, data rate: 4000 B/s on udp port 14280 remote port 14030
INFO [mavlink] mode: Gimbal, data rate: 400000 B/s on udp port 13030 remote port 13280
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] ./log/2021-07-10/13_29_53.ulg
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [logger] Opened full log file: ./log/2021-07-10/13_29_53.ulg
1.62 [INFO]:OSG Error: Not able to create requested visual.
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
PX4 Communicator: PX4 Connected.
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
ERROR [simulator] poll timeout 0, 0
fgfs --launcher
so please help me.