Hey Team,
I am investigating what went wrong with our most Recent Test Flight.
I hope the Log is accessible Here:
I’ve done a deep dive and am leaning towards a calibration issue.
We had GPS issues and disabled GPS to fly and therefore only relying on the Flight Controllers Sensors for State Estimation, mainly the IMU, for the main input to the EKF2.
An explanation of the Flight Performance and moments until the sudden change in events was simply an extended Hover Test. Takeoff and climb to about 6M and then Hover.
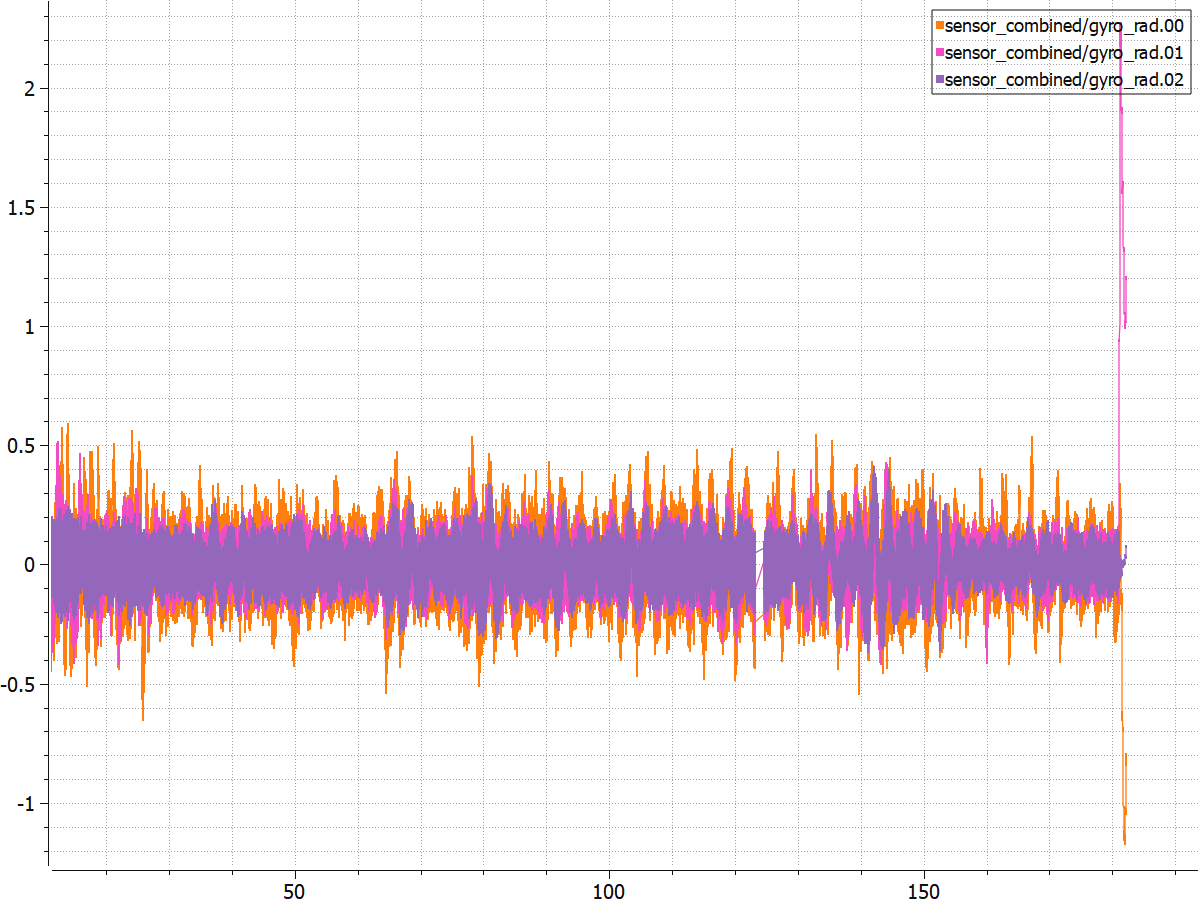
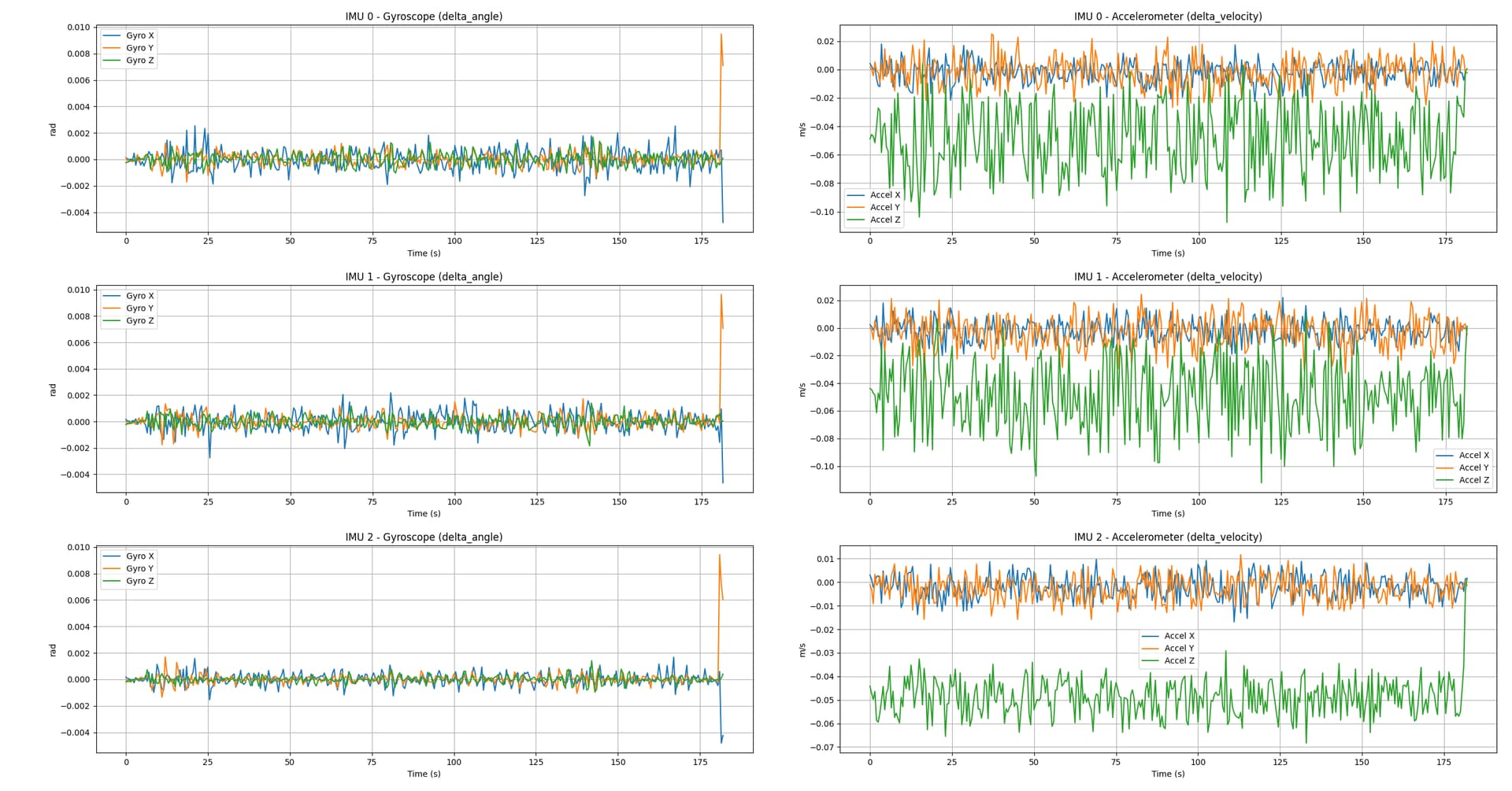
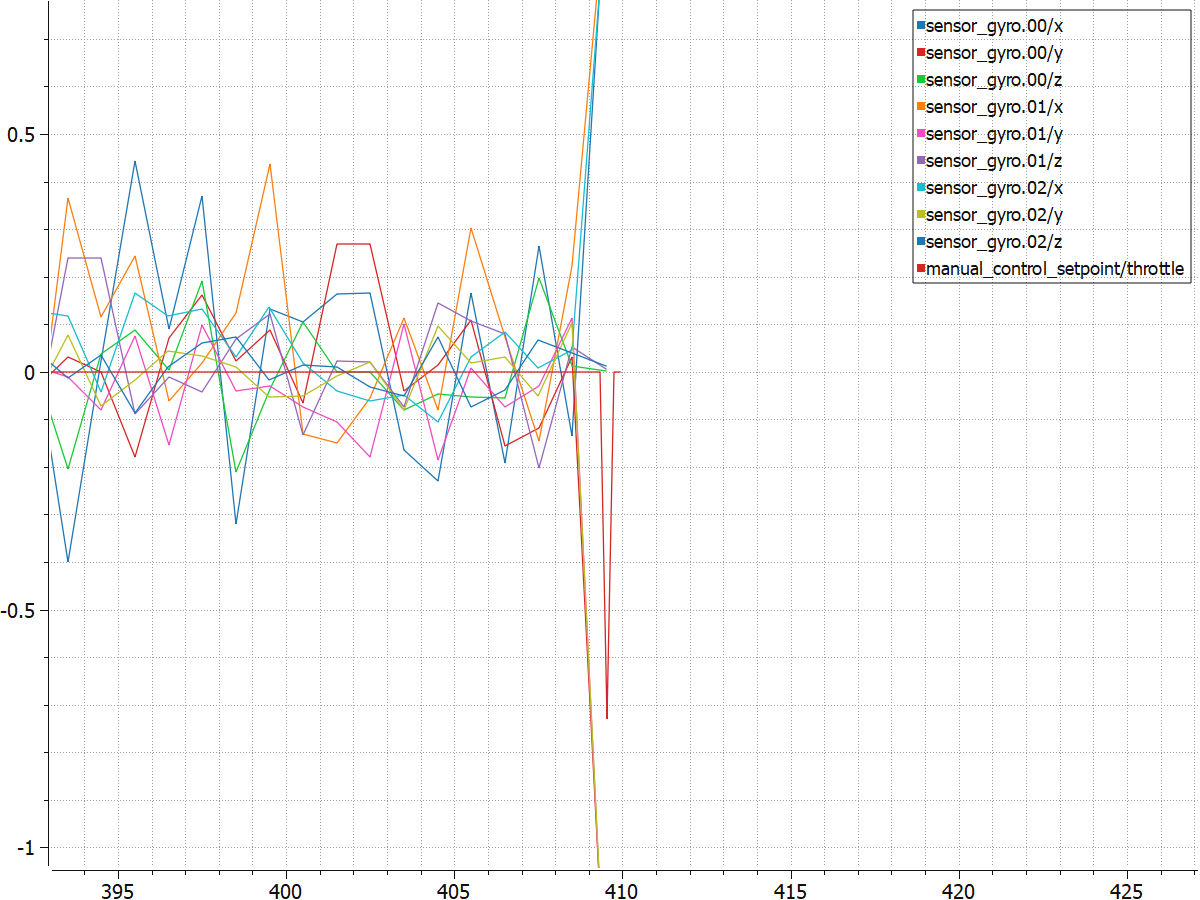
The Drone was Hovering for about 3minutes until the sudden change in IMU readings, specifically the Gyroscopes. All three redundant Gyros reported an extremely aggressive change in angular movement that in turn caused the Drone to react and effectively flip on itself. It responded to what it thought was a valid input.
Doesn’t seem to be any magnetic interference and the pilots input are detected moments after the change in position. (reacting to the drone reacting) Weather was fine.
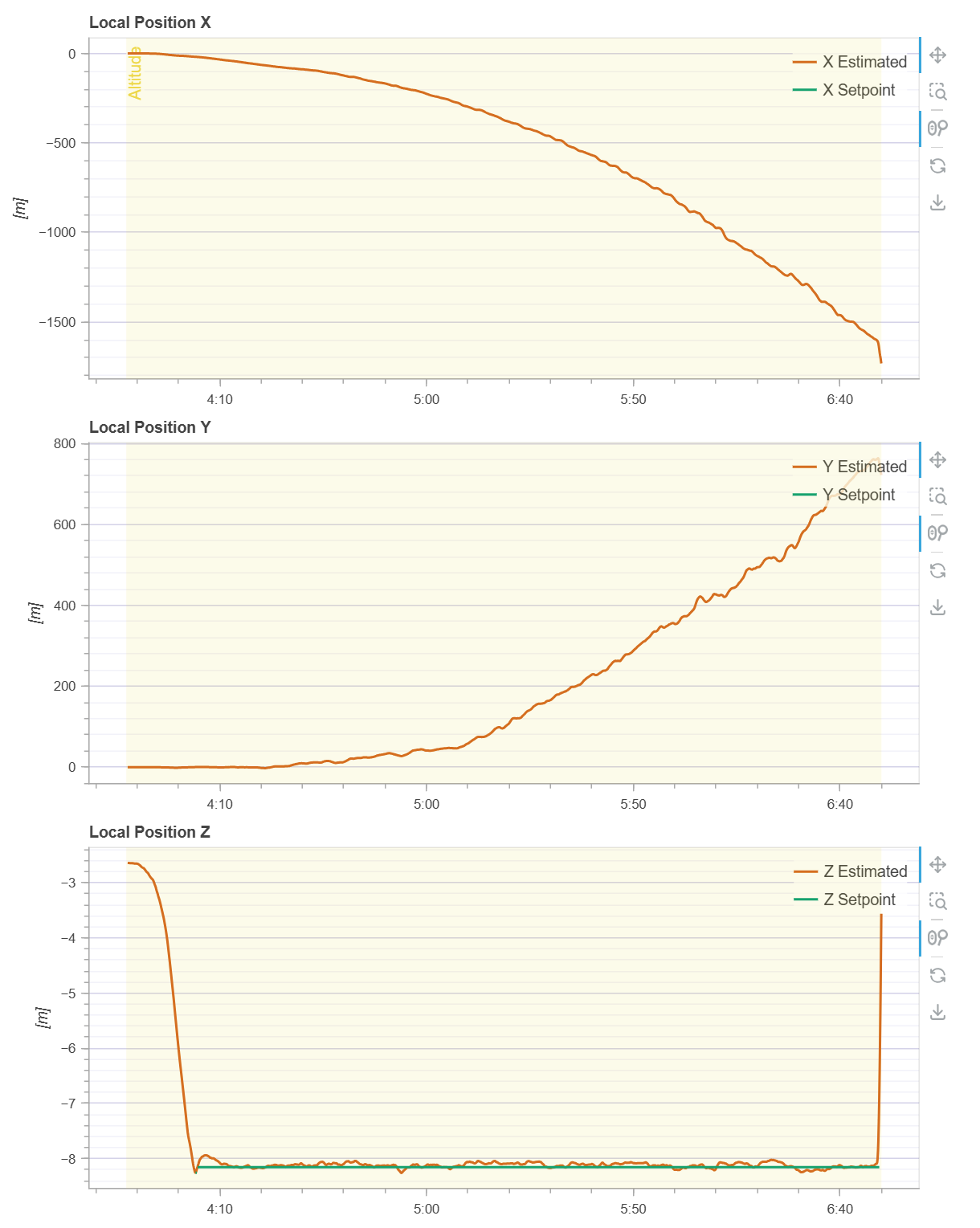
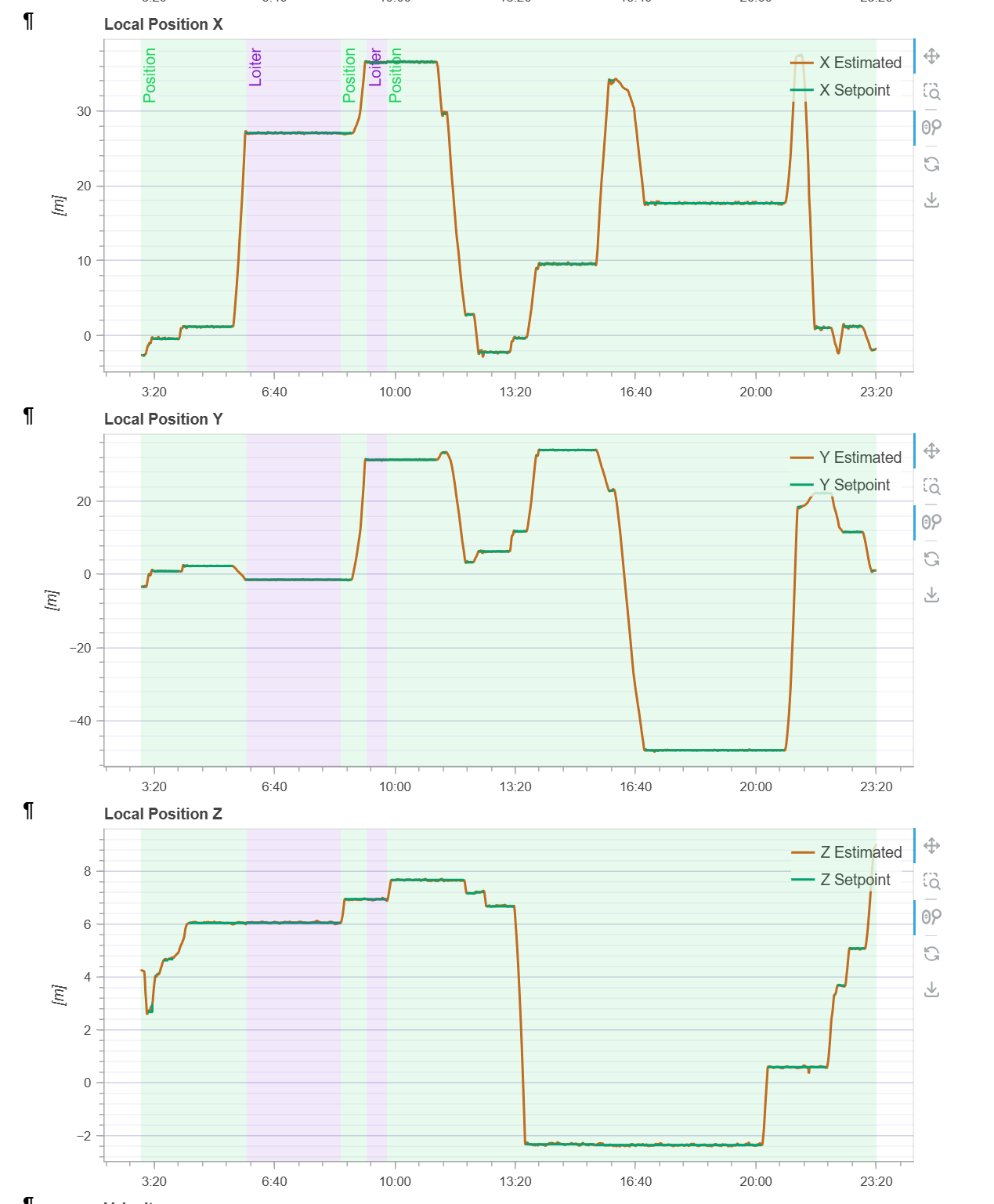
Again my crude theory is some sort of faulty calibration in the open field, something didn’t set right and led to a build up / aliasing and cascading effect where eventually the system rejected its own state, because while the Drone was hovering it thought it was moving ~1000 meters.
Could excessive vibrations lead to a build up errors on the IMU?
The seemingly sudden change in IMU readings before throttle input is simply puzzling me.
Any insights or deeper analysis is very welcomed! =)
Cheers
Marshall
Sorry about the crash.
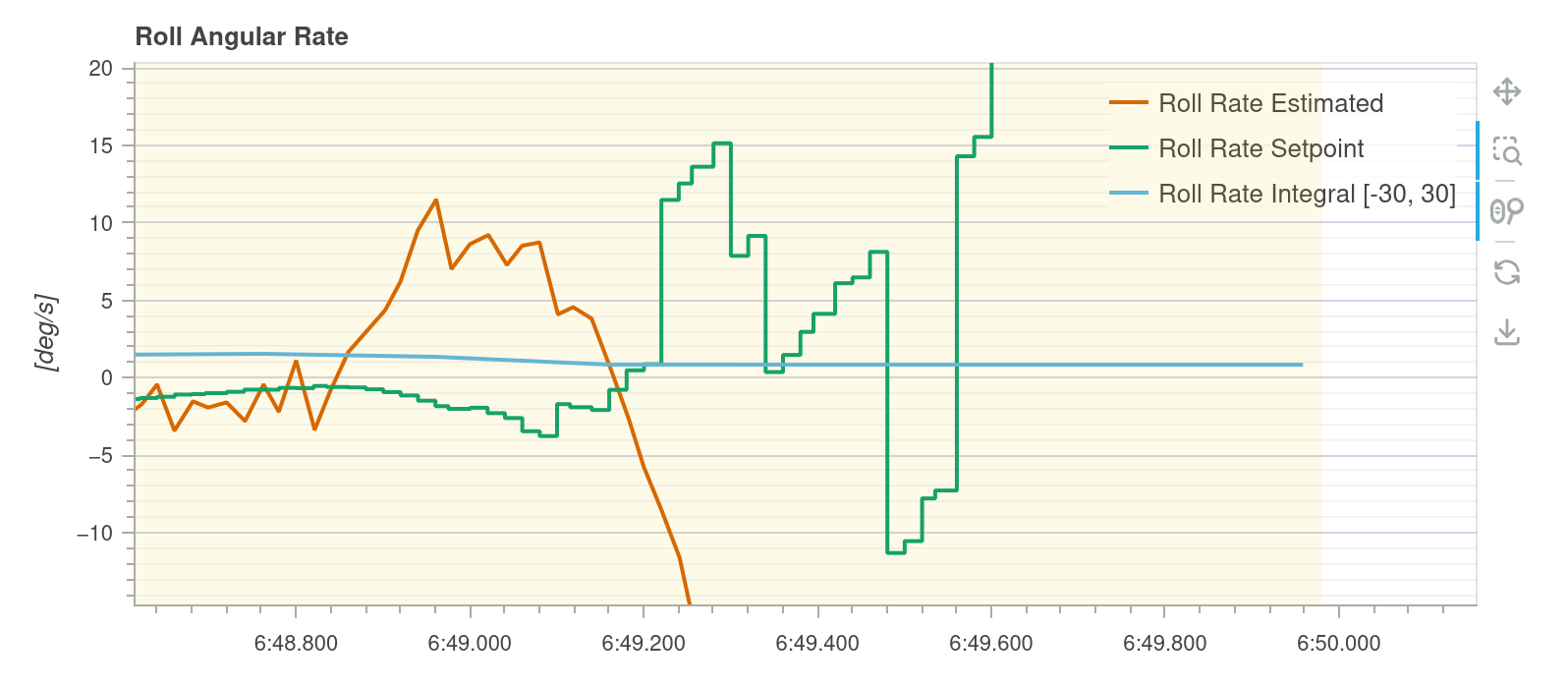
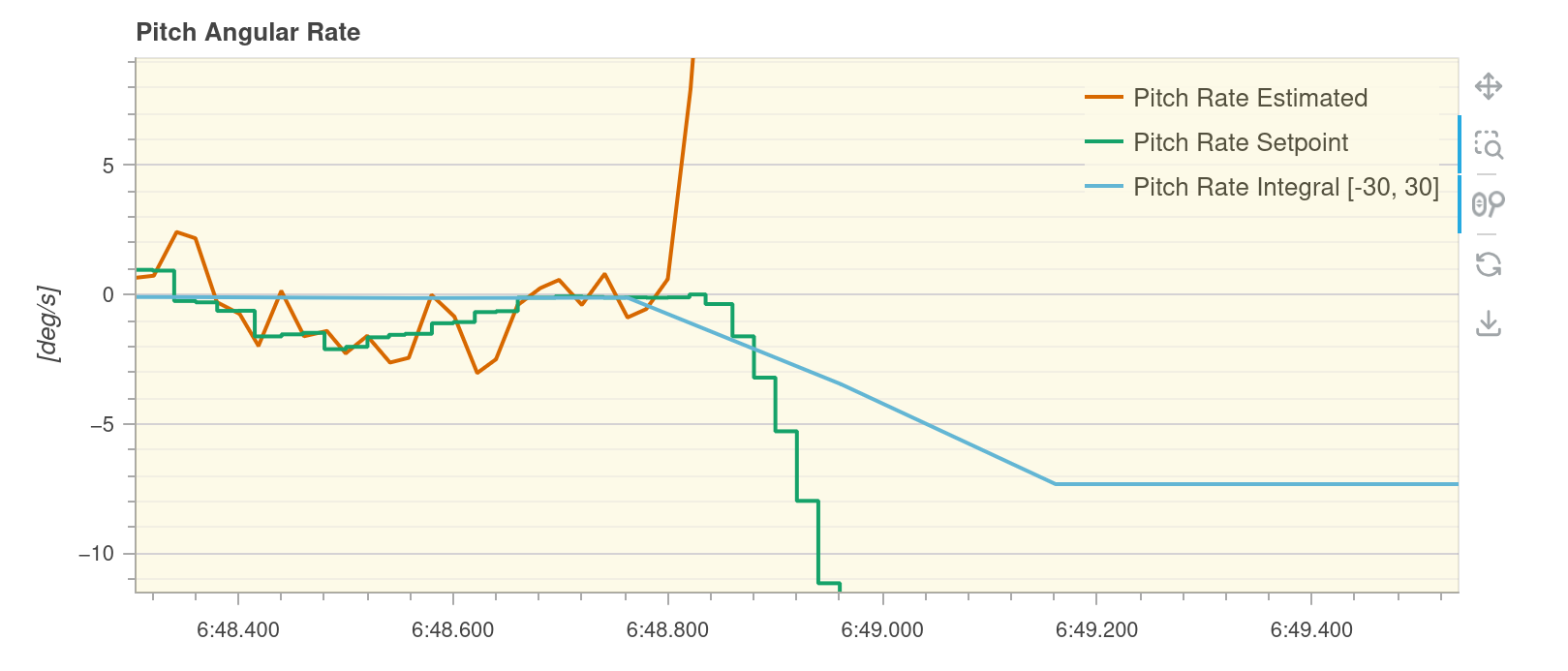
It looks like attitude starts diverging around 6:48.8:
The controller correctly tries to keep it level:
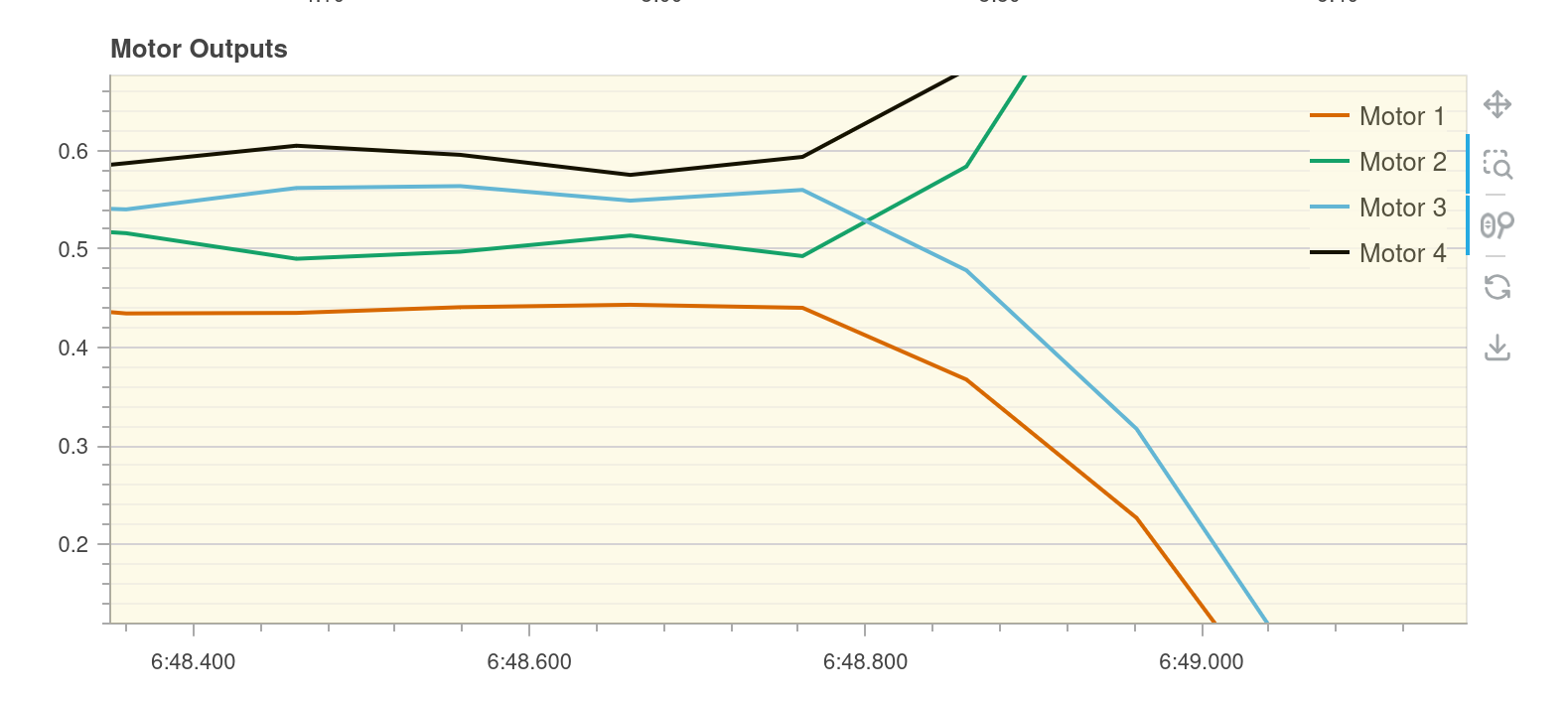
That sort of behavior usually points towards a hardware problem, e.g. one ESC or motor loosing power or sync.
Often, a power module measuring current will indicate when a motor drops out, but that doesn’t look to be hooked up in your case.
Have you checked whether all 4 motors are still working properly, after the crash?
Hey Julian,
Thanks for the quick update! =)
I initially suspected the motors and tested them again on the bench, all are working as expected, no signs of damage on the ESC (burnt FETs or other components), everything seems to be okay.
Yes, unfortunately we don’t have ESC Telemetry hooked up to the FC, as we are oversubscribed on interfaces. We do have a separate power Voltage+Current monitor for the Battery and Power Distribution Board and there weren’t any irregularities (signaling motor desync’s, power spikes, etc).
The unit is built back up on the bench and I’ve re-flashed the FC, calibrated, and will re-calibrate again in the open field before flying but so far that will be the only things changed between the two flights.
Still struggling to understand the root cause of the sudden change in Attitude.
And propellors are spinning at idle/min throttle? If not, that’s a potential issue. They should never stop when armed.
Hey Julian,
Yes propellers were all spinning at their minimum RPMs when Armed.
We have since rebuilt and re-calibrated the the Flight Controller and the unit performs as expected and we’ve now go out a few times with it.
I have hung my hat on the theory of somehow corrupted IMU calibrations during that day, because of the massive drift in local position during a hover test (it thought it went moved 1000M!, see earlier Local Position graphics from above)
Here is a snippet of our most recent flight during a hover test with some minimum movements around the field. Much more accurate / realistic.
P.S.
We always calibrated with a USB hardwired connection, never over the remote.
Thanks for all your help and support, I wont hesitate to reach out in new threads for further debug questions and/or to help the community if there is something I can answer! =)