Hi Guys,
Today I got a scary moment after a Radius Geofence Violation.
After going through it at relatively high velocity, it did an aggressive altitude fly away, I tried to change the flight mode (to get out of the RETURN MODE) but it was so far that it was lost totally !!!
I had to trigger the EMERGENCY MOTOR STOP in flight, and release it after to avoid the crash, it somehow, got back on track, and got it back…
Is there something to do for that? Instead of Return to Land on Geofence Violation would it be better to use Loiter instead?
Here is the log:
http://logs.uaventure.com/view/VBjoibgGRhStVgn6H7EhVf
Regards,
pturcotte
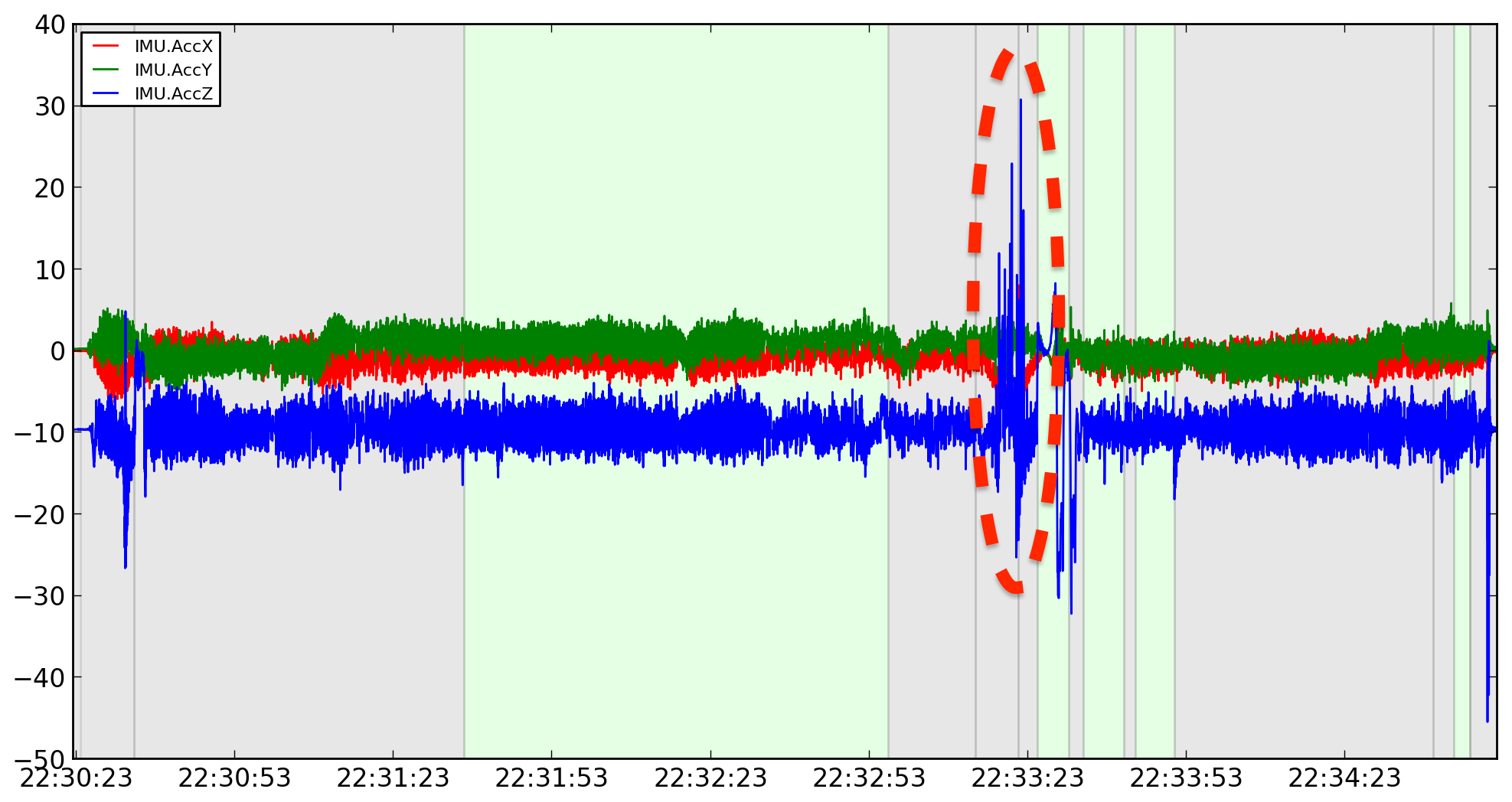
Looks like a vibration-induced EKF2 filter diversion. You need to change your mechanical setup because it produces aliasing on your sensors making it impossible to correctly measure the vehicle state.
http://logs.uaventure.com/view/VBjoibgGRhStVgn6H7EhVf#IMU_Acc_PLOT
Not sure if this vibration has occur before or after the violent altitude flyaway. In anyway, believe it was going really fast !!!
@LorenzMeier in fact, if I understand it correctly, braking on geofence breach has been so violent that acceleration was too high so this has caused the altitude flyaway? Not the first time I see that, same thing as excessive vibrations…
is this similar?
regards,
pturcotte
No. Your airframe has a fatal vibration issue at certain throttle settings. You will need to fix the vibration mechanically. You also might need to enable TPA which will damp the crontrol response on high throttle values.
@LorenzMeier I understand that, but quad was doing “stable” fast forward flight when it breached the geofence, when it tried to stop, it is at this moment it went crazy in the air. Is there a suggested parameter to make the breaking less aggressive?
thank for your help!
regards,
Pascal
@LorenzMeier I retried it today and same result… I paid attention and it did the same thing.
I think it goes so far beyond the GeoFence that it doesn’t like it at all !!!
When I fly it in stabilized and that I switch the flight mode directly into postion it doesn’t do that.
Props are balanced properly, I don’t see any nasty vibration and quad was doing “stable” fast forward flight when it breached the geofence, when it tried to stop, it is at this moment it went crazy in the air.
Maybe it tries so much to brake / go back in place that acceleration is too much?
I tried to use TPA as you suggested but all I had was MC_TPA_BREAK and MC_TPA_SLOPE
I had no idea how to tune that…
While in 1.6.0 we have new parameters like MC_TPA_BREAK_“PID” and MC_TPA_RATE_“PID”…
I really would like to test 1.6.0 dev but I have an issue with Sensors --> Level Horizon in QGC 3.1.2
I can’t get it to calibrate…
Thanks for your help !!!
regards,
pturcotte
Hi Guys,
Today I went back in the field to test it again.
I might have an hard time explaining it, but here is what I think…
During the setup I have changed the MPC_MAN_P_MAX and MPC_MAN_R_MAX from 35 deg to 45 deg.
Obviously when it is inclined to maximum at 45 deg it requires much more throttle to stay at the same height… Also dynamic pressure changes a lot and I think, when it reaches the Geofence the BARO doesn’t have time to keep up.
Also Geofence is programmed in “LOITER / HOLD” so I still think that it tries so much to brake, it has to put it back straigh, moreover it must incline it in the other direction and it creates that violent sudden brake and acceleration.
At 35 deg, it has less velocity, doesn’t have to fight back like crazy to stop it…
Does it make sense?
Regards,
pturcotte
Hard to say without more log files.
Again, the issue you experienced had nothing to do with Geofence. You had excessive vibration leading to aliasing on the accelerometer before you hit the geofence and while you were flying in manual mode.
When that happens your position estimate will become incorrect because the acceleration of the vehicle could not any more been measured correctly as the sensor hit its limit due to vibration. The default gains for EKF2 are set to give good performance for reasonable setups, not to survive aliasing on the sensors (which only happens if your setup is mechanically incorrect).
This is a mechanical issue with the way you have mounted your propellers and/or the autopilot. No amount of software change (in code or settings) will fix this. I can also see abnormal spikes in your later flights.
To solve this you will need to change your mechanical setup. Not parameters or software versions.
I agree with you something is obviously wrong and it is picking up excessive vibrations.
It gives me a good idea where to look now.
I think (not sure, this is to validate) that propellers might be the issue. They are balanced, but at some extend, they can’t withstand that much aggressiveness…
These are Phantom 3 propellers that have been used on a F450. They look identical to original F450 propellers, but they could be different in material, etc. Since I can’t control this, it is hard to say.
In winter conditions something changes.
Is it the propellers that are getting unbalanced with cold?
Is it the Pixracer that is hard mounted to the frame using only a layer of double sided tape, etc.?
Obviously I have to do my homework…
Thanks a lot for your time and your detailed answer.
Keep you posted.
Regards,
pturcotte
@LorenzMeier for your information, we finally discovered what was wrong… two things in fact, you were right. We had an excessive vibration at high velocity with max angle, yesterday I have been able to hear it. Props are not good for that amount of power !!! It is too much, way too much.
We have reduced the MPC_TILTMAX_AIR from 45 deg to 30 deg to reduce bracking power.
MPC_MAN_R_MAX and MPC_MAN_P_MAX from 45 to 35 deg.
What we think is that we are indeed stalling the blades when it brakes in addition to excessive vibration.
By reducing MPC_TILTMAX_AIR, of course it drifts more when it hits the geofence, but for our application it is perfect.
Today I flew it at -20oC (-4oF), everything was ok. All you need to do is wait until vehicle reaches operating temp, recalibrate the compass and barometer and your good to go.
Looks like our issue is solved.
Thanks a lot for your help !
Regards,
pturcotte
Hello,
I see in many places that the vibrations are too high and causing problems.
But I can’t find anywhere an amplitude value that would be reasonable and a value from which I should start considering improving my mechanical setup.
Could someone comment on that please ?
Is there any guide on how to evaluate those vibrations please ?
Thanks in advance !
Have a nice day
I could at least improve it to have an amplitude variation lower than ±1.5G on X and Y axis and around ±2.5G on Z axis.
Hope it will help others in the future