Hello,
I am getting an error on visual odometry and the plots are moving backward in time. Not sure why this is appearing. I am using motion capture position control flight, EKF2.
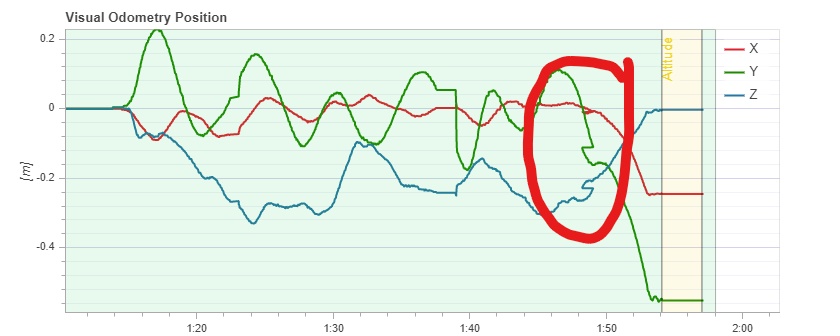
These cause erroneous values in local position. Does anyone know of a possible cause for this plot error?
LOG:
https://logs.px4.io/plot_app?log=cc760d0b-04a4-4f7c-acc7-39d98e36aa11