Hello,
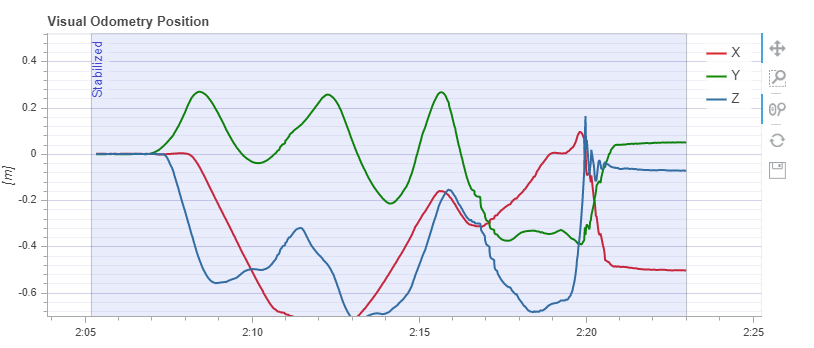
The quadcopter is using motion capture. Position data is forwarded from the ground with a wifi link to a companion computer. The data looks good from the motion capture software, and in the log (Visual odometry position)
However, the local Z position estimate diverges quickly at 2:20, causing the crash:
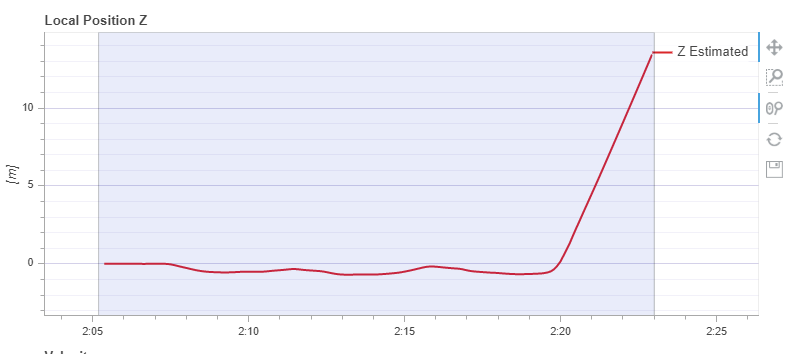
The vertical position check bit is triggered at 2:20, so the estimator detects the divergence.
It could be an issue with the wifi. If there is a sudden lag spike, I think it would be undetected in the log files, and the packet would arrive late, but the data would still look correct on the log file as there is a timestamp.
Is there any other clue I could get from the log file?
Any idea of how to troubleshoot this?
Here is the log file of the issue:
https://review.px4.io/plot_app?log=a789c627-bcaf-43c0-9371-e2ebef09ece0