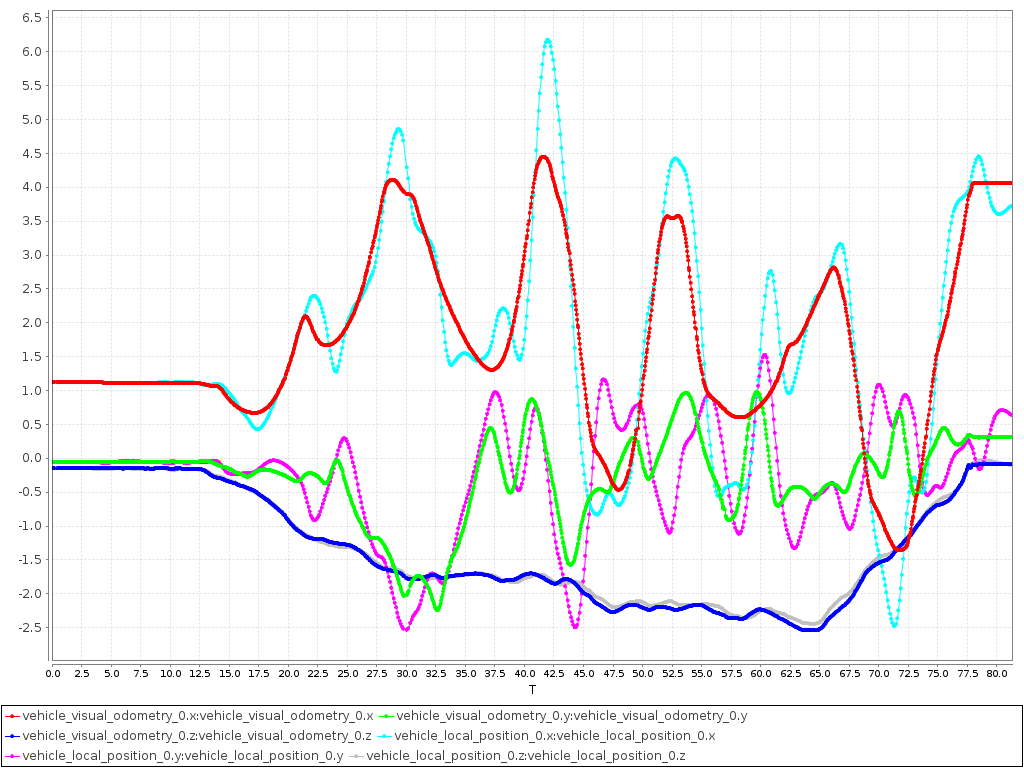
I am trying to fly a quadcopter autonomously using MOCAP measurements. So far, it seems PX4 is receiving these measurements correctly. However, when I fly this manually in ALTITUDE HOLD mode (which works reliably since the Z local position tracks the Z MOCAP position well) the X and Y local position either drift or seem to lag behind the MOCAP measurements, as shown in the figures below.

I am currently using EKF2 and the MOCAP measurements have a transmission rate of approximately 100 Hz. I’ve tried tuning the EKF2 parameters and have had small improvements. I have also made the changes illustrated in the following link, which supposedly fix some syncing issues:
Could someone suggest what I should do next to improve the EKF2 estimates tracking of the MOCAP measurements? I am also attaching a pdf showing the parameters I had in my last flight. Thank you in advance!
paramsQC_MOCAP.pdf (49.3 KB)