Among ekf tuning parameters, there is ekf drag specific forces.
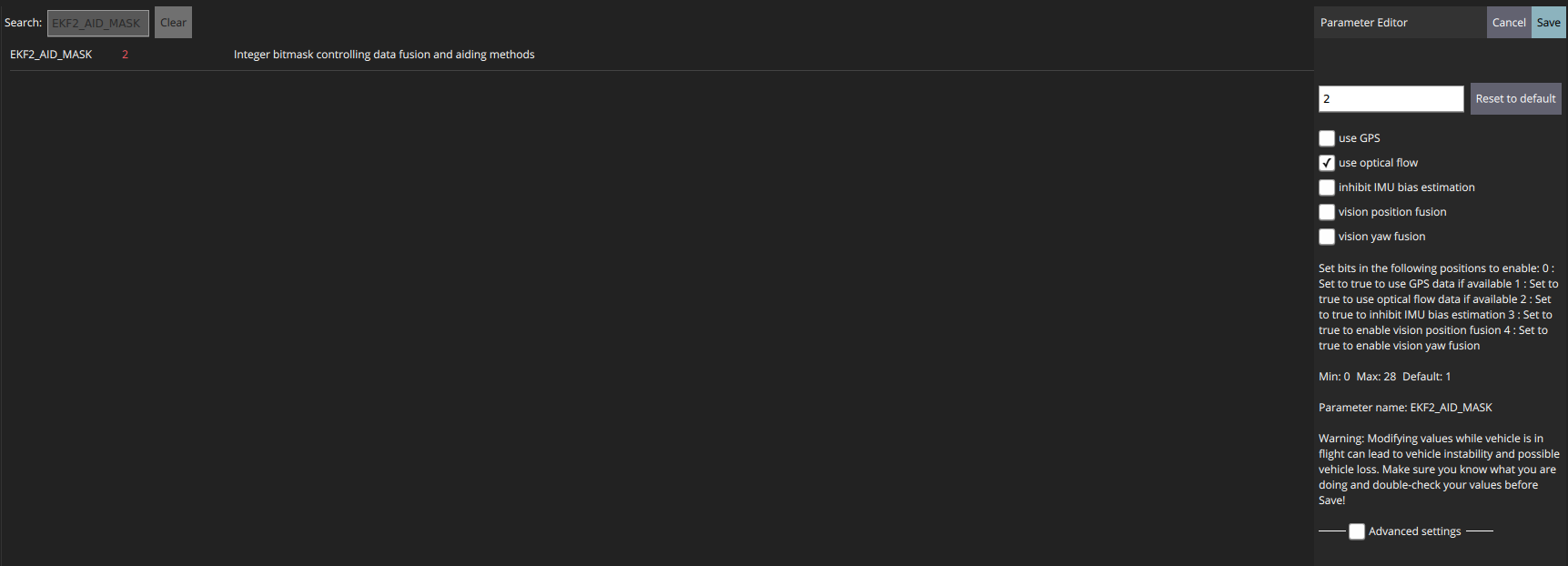
Developer documents tell me bit position 4 of EKF2_AID_MASK set true,
but in QGroundControl(version 3.2.0) parameter setting, that position means vision yaw fusion enable.
I think the parameter values just haven’t been updated yet. Which documentation are you looking at?
This is from the EKF backend.
// Bit locations for fusion_mode
#define MASK_USE_GPS (1<<0) // set to true to use GPS data
#define MASK_USE_OF (1<<1) // set to true to use optical flow data
#define MASK_INHIBIT_ACC_BIAS (1<<2) // set to true to inhibit estimation of accelerometer delta velocity bias
#define MASK_USE_EVPOS (1<<3) // set to true to use external vision NED position data
#define MASK_USE_EVYAW (1<<4) // set to true to use exernal vision quaternion data for yaw
#define MASK_USE_DRAG (1<<5) // set to true to use the multi-rotor drag model to estimate wind
Thanks a lot. No error in make.
But, how can I make it show up in QGroundControl?
I also edited ~/.config/QGroundControl.org/ParameterFactmetaData.xml,
but it doesn’t show up in QGC.