Hi, I’m messing with 3-axis magnetometer tests on 1.12 firmware (1.3 working the same way).
Copter placed on a vertical string and freely rotates over vertical axis. I’m spining it around and observe how the heading behave. According to the code, the vertical rotations is a condition where 3-axis magnetometer became observable, hence the experiment seams to be valid.
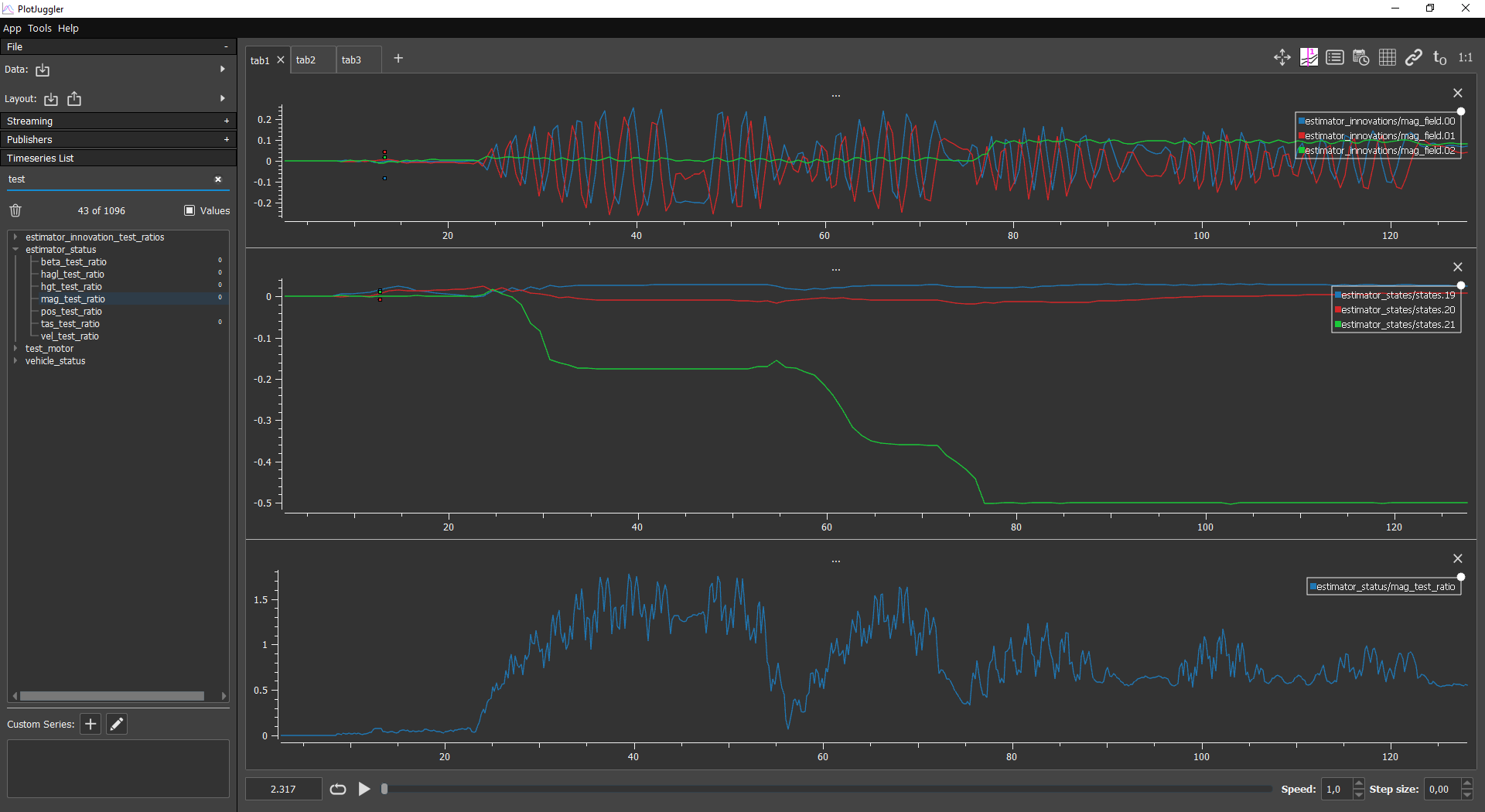
So after some runs, mag_test_ratio hits its limits and the heading became not valid.
https://logs.px4.io/plot_app?log=52070fb6-8e95-4b98-be65-50a52f0296ef
The vehicle is a standard DJI 450 frame,
CubeBlack
External compass replaced to be inline with internal. ROTATION = NONE
The question is: Is it an expected behaviour of EKF or I’m doing something wrong.