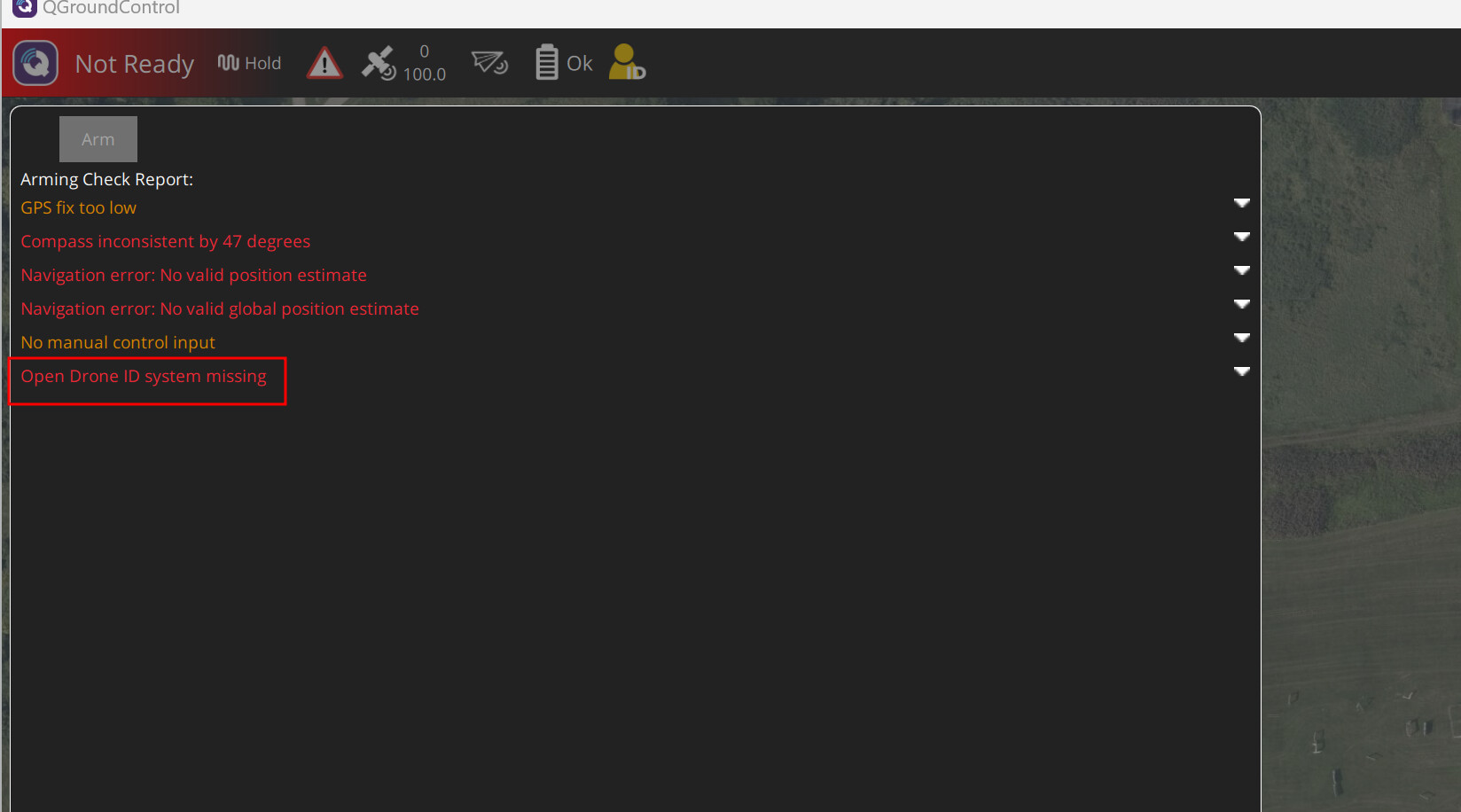
I just flashed mainline and can not get rid of this error:
“Open Drone ID System Missing”
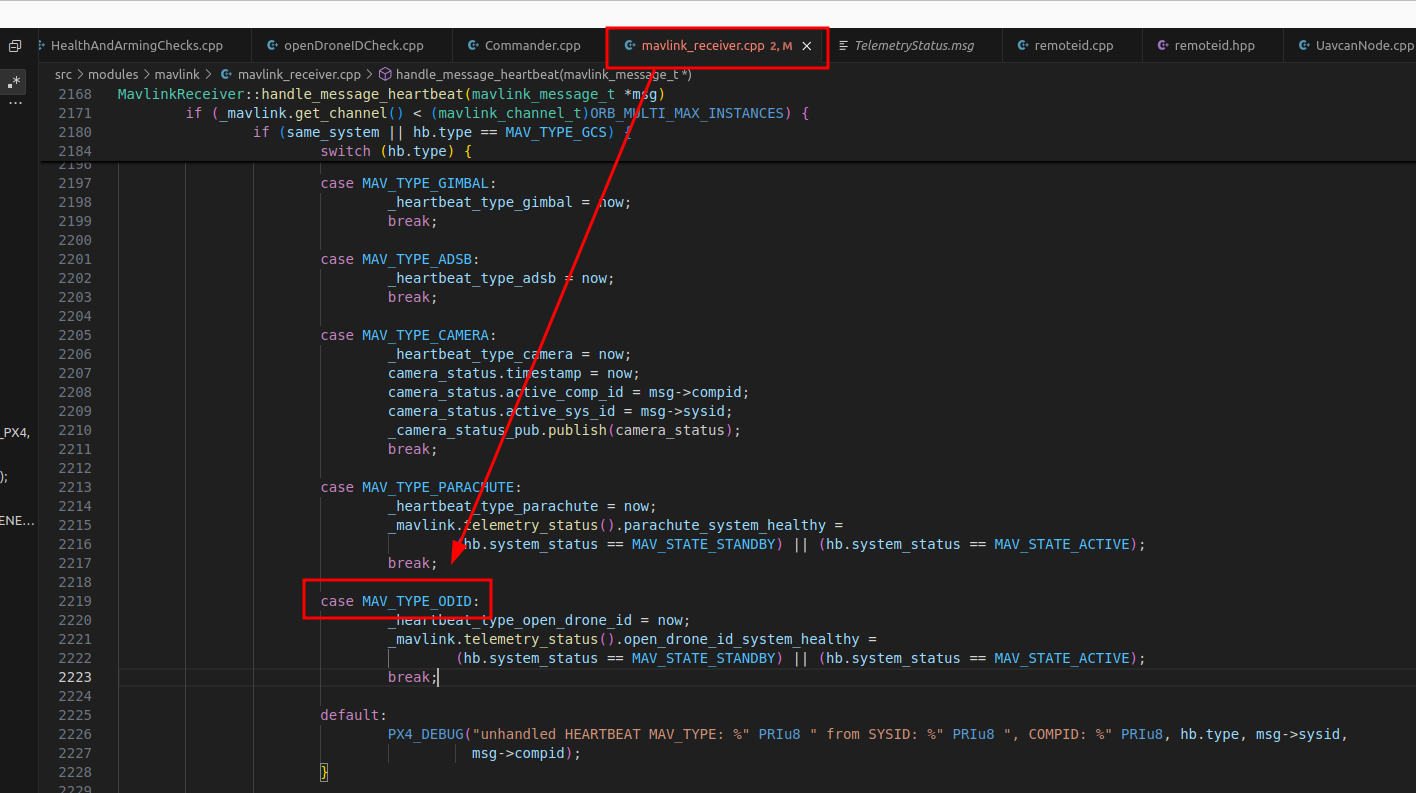
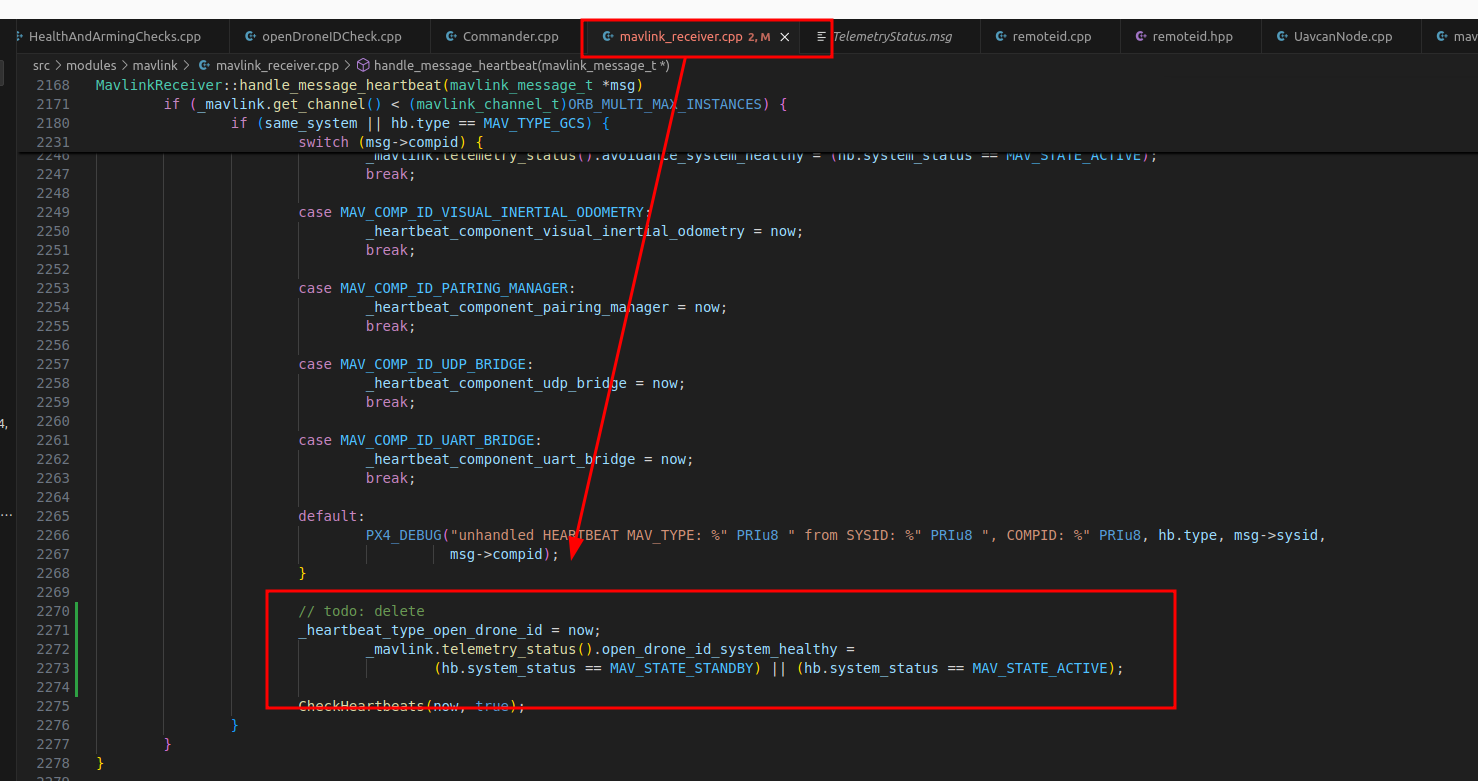
This message doesnt seem to be getting propagated. When I manually place the beef and potatoes of the conditional at the end of the function I no longer get the error
So, I know we need to emit this heartbeat. @dirksavage88 mentioned this might be something to implement in uavcan driver.
Wanted to understand where I should go from here. Thank you