Greetings community,
I am currently in the middle of my first drone (quadcopter) project, and I am looking for an expert opinion on whether everything is as it should be.
After searching the internet, I chose the components and put everything together. I managed to make my first flights (and crashes).
What bothers me is the constant drifting of the drone. When I release the roll/pitch command, the drone starts drifting in a random direction. I say random because the drift direction is not consistent. Usually, at the beginning of the flight, it drifts backward, but this changes during the flight. The flight height is also not stable. If the throttle is released, the drone oscillates up and down by about 0.5–1 m.
I am doing the tests at a low height of up to 2 m, flying in stabilized mode. I tried calibrating the sensors multiple times with no real improvement. It got slightly better when I connected the GPS module with the internal compass (I am not using GPS, only the compass). For now, I limited the maximum throttle to 50% using MPC_THR_MAX = 0.5 because the drone was too powerful for my beginner skills.
My question is: is this normal? How stable can a home‑built drone be? I’ve seen completely stable drones flying indoors without GPS. I don’t want to switch to position mode until I tune the drone as well as possible.
Firmware: I am using firmware 1.17.0 because I have an ELRS radio and needed to flash a custom version. I followed the instructions in the PX4 docs. Would it be better to make a custom build with V1.16?
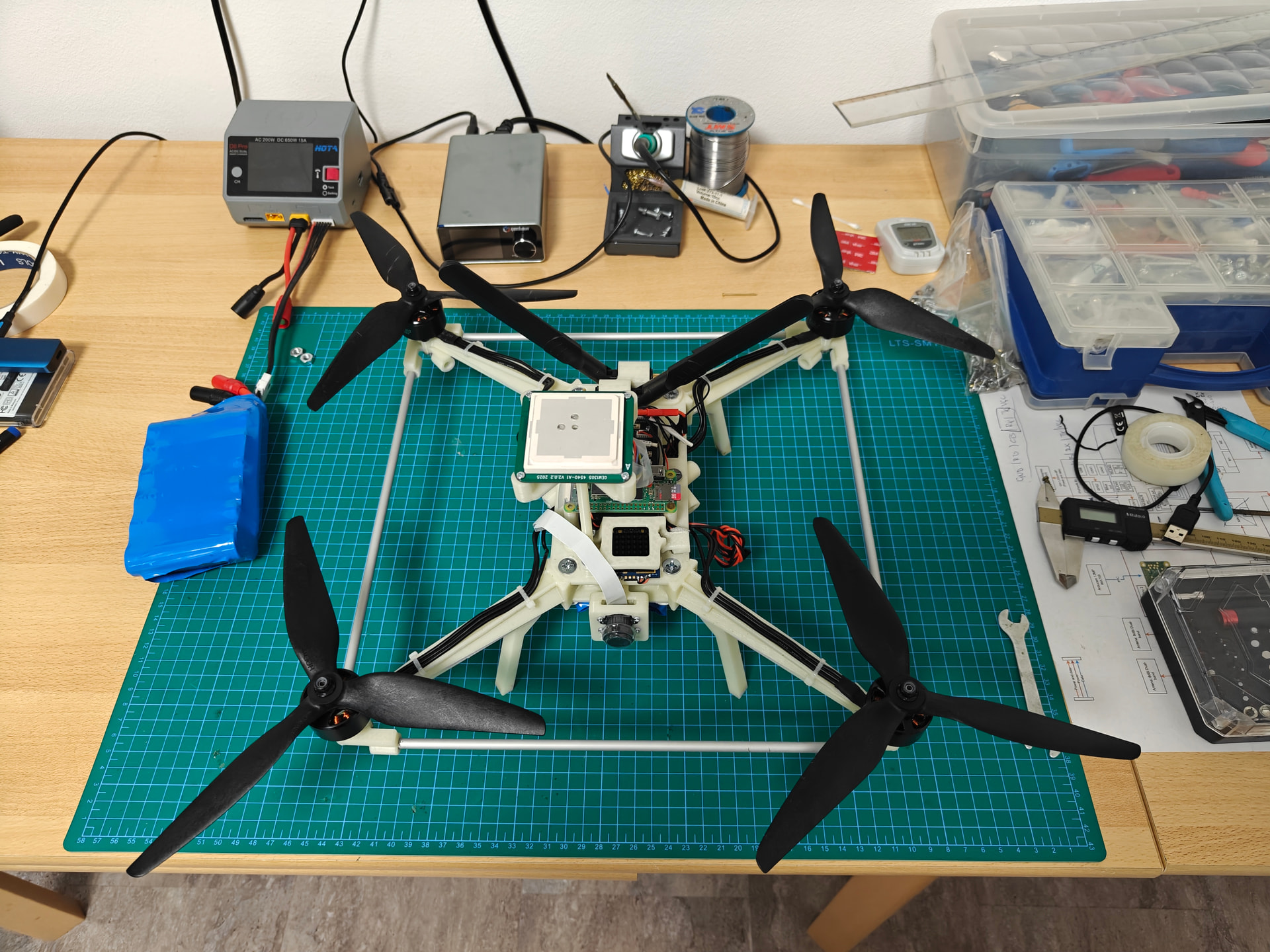
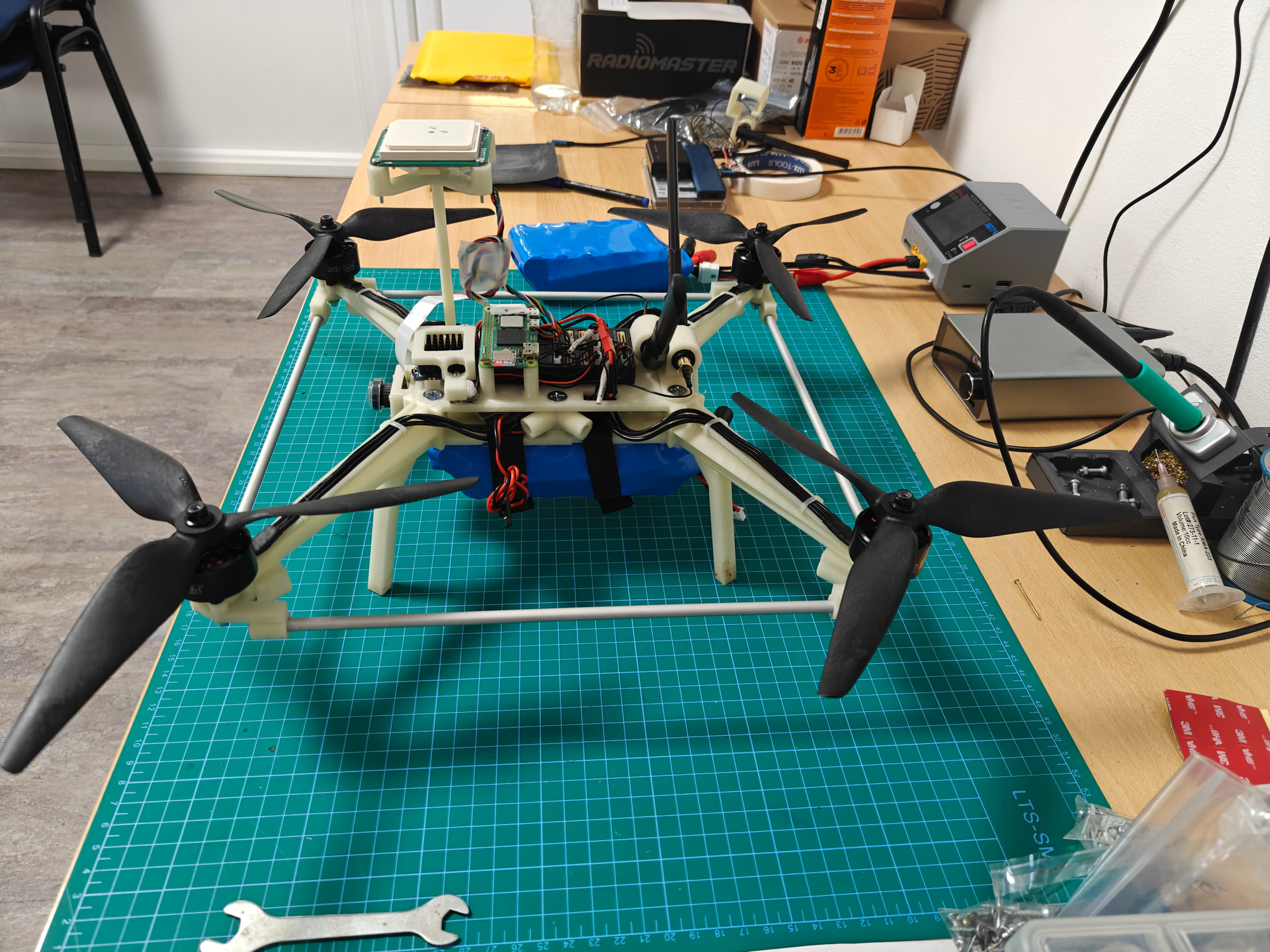
Hardware: Pixhawk 6C, Teko32 F4in1 65A ESC (DShot600), 5V BEC, DATAGNSS 1305 GPS, Raspberry Pi Zero 2 (OpenHD for telemetry + video), BL‑M8812EU (Wi‑Fi chip), generic Wi‑Fi antennas, 4× Surpass Hobby BAT 2812 900KV motors, ELRS receiver, Radiomaster Boxer ELRS transmitter. Total drone weight is approx. 1.5 kg.
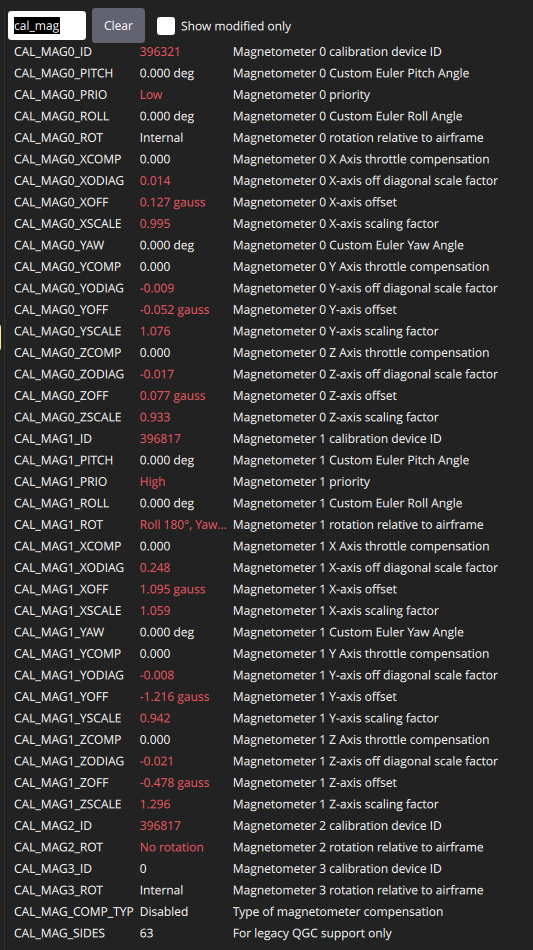
Sensor calibration:
Two logs of test flights:
- https://review.px4.io/plot_app?log=e5068c3f-13e2-4d96-8e0c-dfe6b5894730
- https://review.px4.io/plot_app?log=3e212bab-6544-40b5-a884-f608ce5b8442
Thank you all for the support.
P.S: A few pictures for attention.