I’m looking for ways to disable roll-yaw coupling in offboard flight mode to disable compensation for adverse yaw/dutch roll effects. I know that in acro flight mode, the parameter FW_ACRO_YAW_EN can be used, but I’m struggling to find an equivalent for offboard mode.
One approach could be setting FW_Y_RMAX to zero, but I’m not convinced this is the right solution. Additionally, commanding a 0 value for yaw_body in the VehicleAttitudeSetpoint message doesn’t seem to be effective based on my flight analysis.
Any ideas or suggestions would be greatly appreciated. Thanks!
Unfortunately, I’m unable to find the parameter FW_RLL_TO_YAW_FF in the parameter reference.
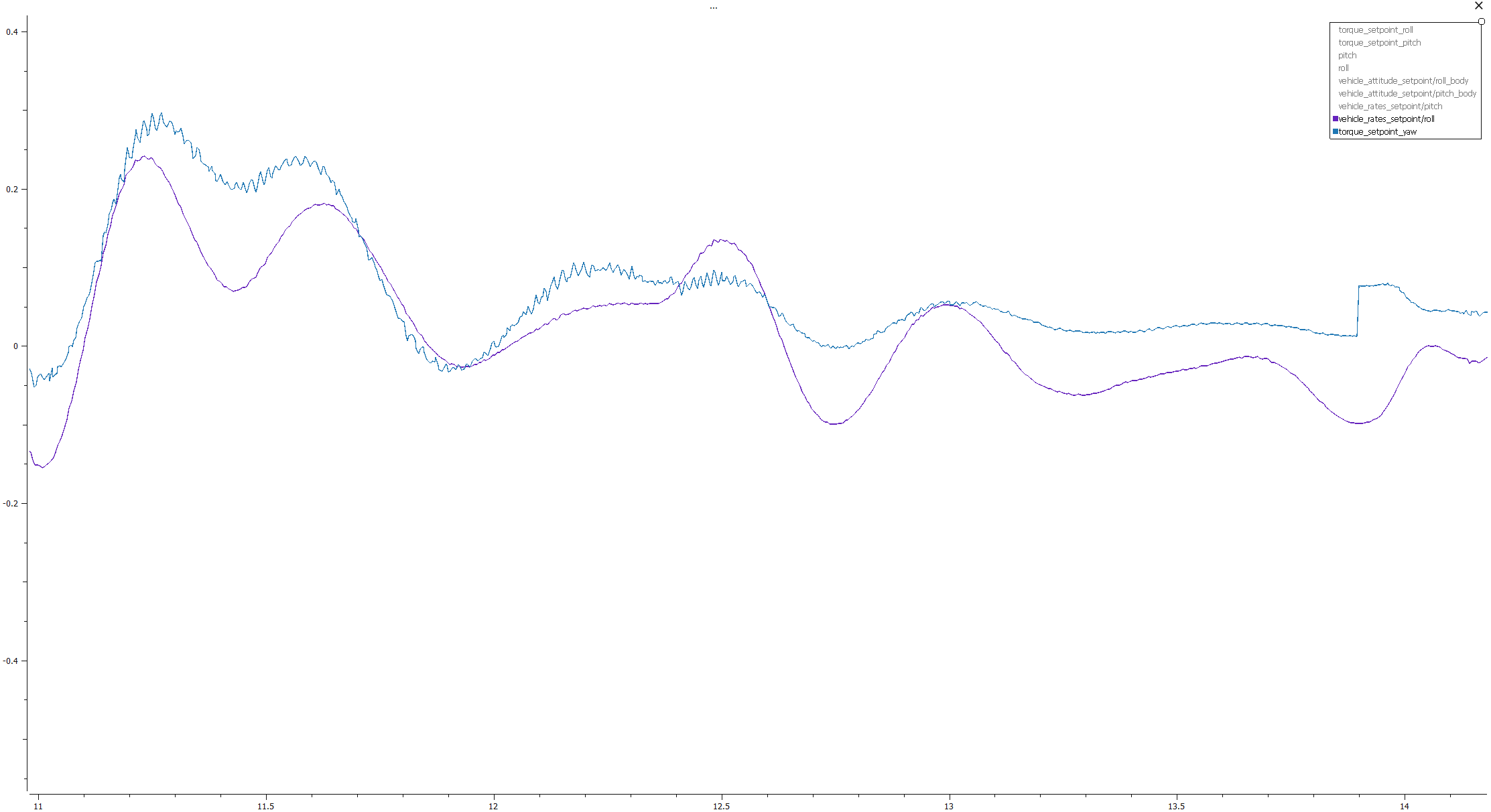
Based on the flight test video footage, the rudder appears to move synchronously with my ailerons, suggesting there might be a mixer working in the background. Additionally, the log data shows some coupling of the roll and yaw torque values: