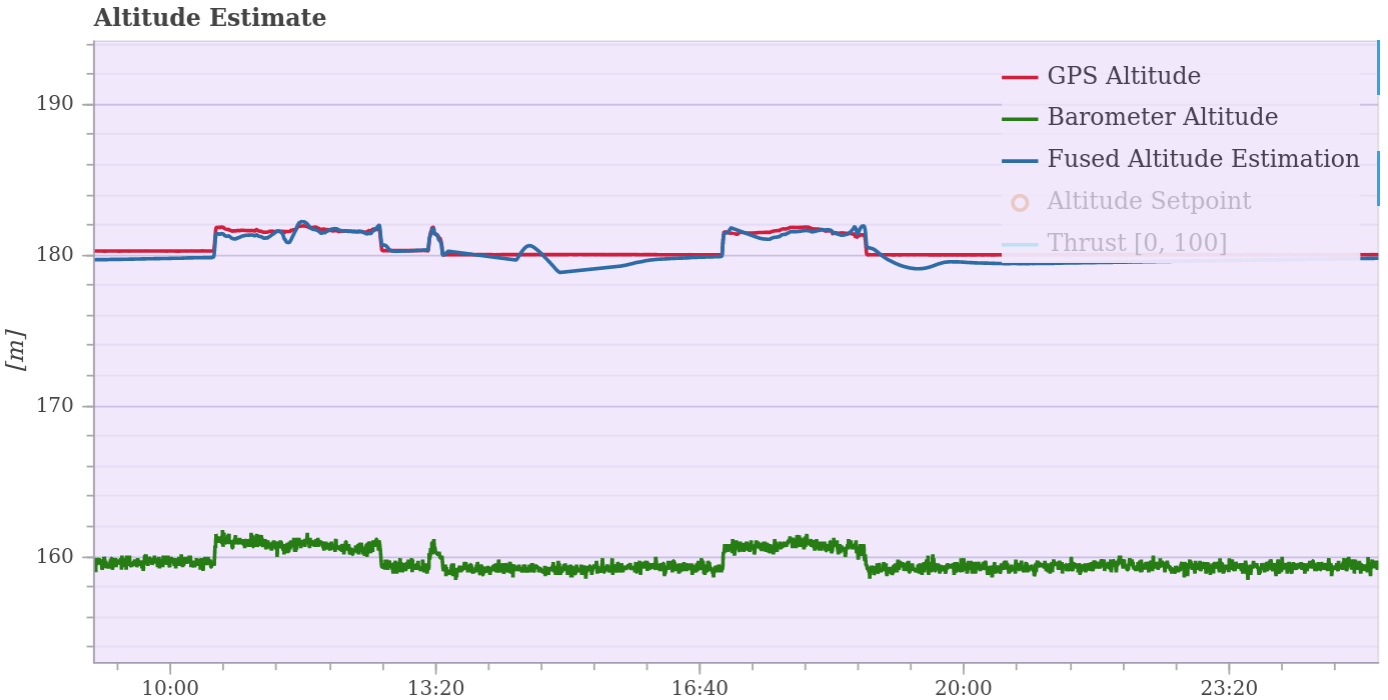
Hi, could someone help understand what is the difference of these two in the flight log(GPS altitude/Fused Altitude estimation), when I already set EKF2_HGT_Mode to GPS?
My understanding is if I use GPS as the primary height source, the fused altitude would use the GPS_RAW_INT data, however, my flight log shows the height reported by GPS and Fused one are different sometime.
CarlOlsson has pretty much nailed it. The reason is that many GPS’s only update once per second (and high end GNSS devices update 5-10 times per second) and is often only accurate to +/-1m in good conditions.
The state estimator is using the other sensors to to fill in the gaps between the 1 second GPS updates as well as improve accuracy.