When using Pixhawk hardware combined with a companion PC, it is typical to be using some form of an FTDI USB serial adapter to connect to the Pixhawks TELEM2 port. These generic FTDI USB adapters aren’t built with Pixhawk use in mind, therefore lack connectors and proper configuration for plug-and-play use.
@mhkabir and myself have solved this problem by creating our own FTDI adapter to be plug and play compatible with all Pixhawks FMUv2 and up (JST-GH 6-pin connector). We follow the Dronecode standard for pin to pin compatibility, so setting up is as simple as connecting a USB cable and the 6-pin JST-GH to the Pixhawk.
We also worked in some nifty features such as:
Flow control: to give you the best serial port reliability and speed
Solder pads: for connecting USB and serial lines for increased reliability (no connectors needed)
Power switching: can choose between companion and pixhawk 5v to power FTDI
I’ve been using this in various projects and it always speeds up development time to have something simple to setup with the Pixhawk hardware.
Example: FTDI breakout connected to companion computer (NUC) and Pixhawk 4 using a USB Mini B cables and 6-pin JST-GH to 6-pin JST-GH below.
NOTE: It is ALWAYS recommended to solder the USB cable data and power wires to the FTDI board with an appropriate connector on the other end connecting to your companion computer securely.
Hello @Bryan_Monti !
This is very nice. Please can you upload a picture showing connections to any companion computer (as per your time) both here as well as on the purchase link. This will be helpful for beginners. Thanks much.
These are drastically different FTDI adapters. I list these differences below:
The adapter you posted runs the IO at 5v default and, as far as I’m aware, supplies 5v from the FTDI with no option to cut it out on the board meaning you have to cut the red wire before connecting to the Pixhawk for safe use.
The CTS/RTS pins for flow control are broken out as 0.1" headers instead of properly integrated into the JST-GH for plug-and-play use
That FTDI doesn’t cotain Tx/Rx LEDs for debugging purposes (from what I can see here, listing doesn’t say anything either).
Once set up properly, that FTDI can be used with the Pixhawk but seems like far too much work to set up properly.
Sure! It’s mainly due to the larger area of contact with solder so the connector/board itself can handle more stress around that area. Usually micro only has 2-4 small anchor points whereas there are 4 large contact points on the Mini B connector. Also have found the overall connector to be more reliable than micro.
Ideally, if you know this is going to be mounted permanently you should be soldering to the pads on the bottom of the device and shrink wrapping it.
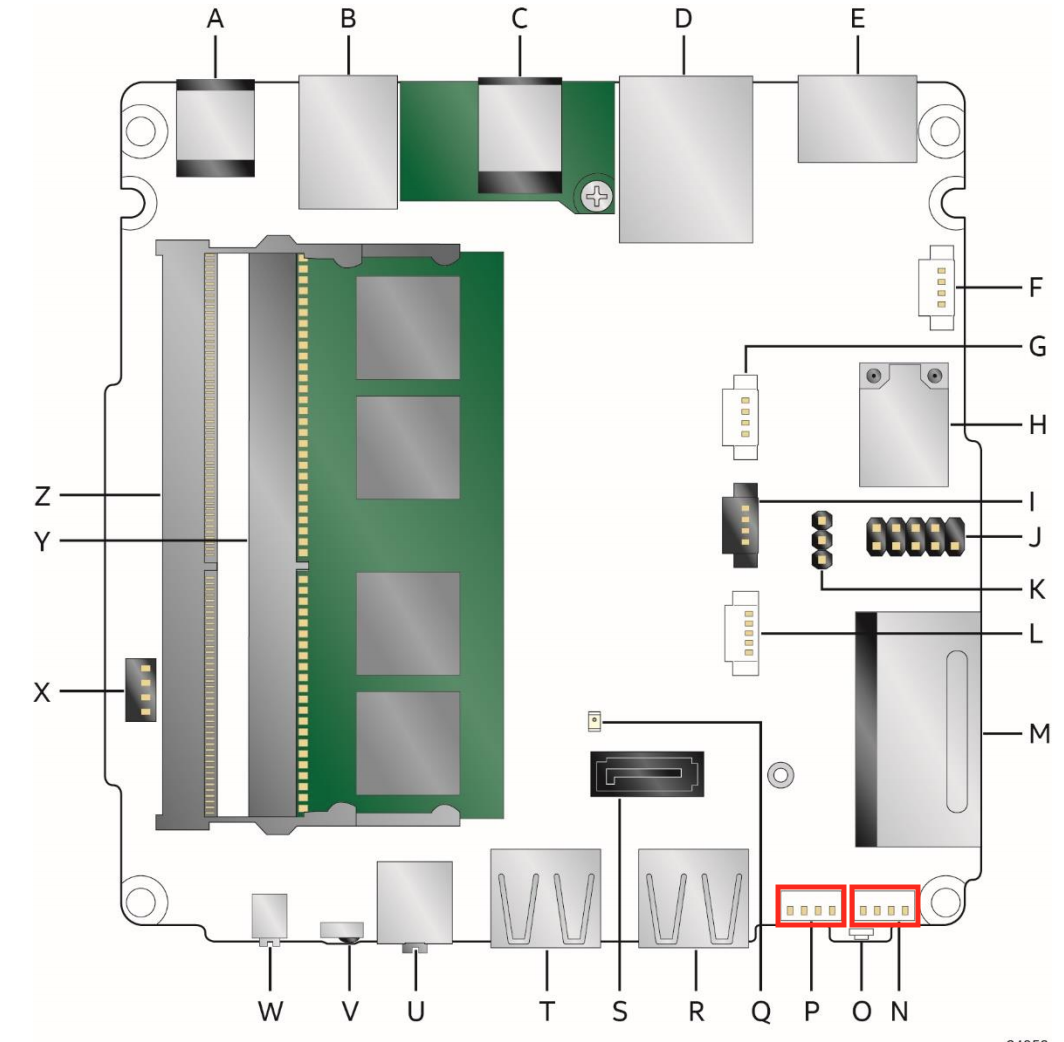
@Vrinda, if you are planning use a necked Intel NUC as your onboard computer, then I suggest you connect the FTDI adapter to one of the two 1.25mm pitch USB motherboard connectors instead (see N & P below); which in that case, you can use this adapter and connect only GND, Tx, Rx to the adapter using this cable on one side and this one on the other side. Then, just cover the adapter with clear heat-shrink once you’re done soldering the cables to it.
Be careful when linking to generic NUC layouts without specifying model numbers. I have a NUC (7th gen) that has the USB 2.0 4-pin PicoBlade 1.25mm pitch connectors in a different location.
I don’t think that 3-pin DF13 will work on Pixhawk v1 for the TELEM2 port, since it is a 6-pin connector. Please revise your post so that people do not purchase the wrong cables/parts.
Also note that adapter does have CTS/RTS broken out for flow control, which you should make use of to increase serial link reliability!
@Bryan_Monti, I actually will be more concerned with your suggestion on using the USB plugs on the NUC and on your FTDI adapter (as shown in your picture above) since they are not tolerant to induced vibrations or misalignment; which causes connection failures.
@Al_B I’m sorry about that, it is misleading. I’ll update the picture to mention that this is just one use-case and it is recommended to solder the USB lines to a proper header connector for installation.
In this case though, the FTDI you linked originally should be removed or have an amendment added mentioning you cannot solder to the USB lines on the board thus making it unreliable in high-vibration environments.
@Bryan_Monti, your point is well taken so I’ve removed it. Also, thank you for the suggestion on connecting the CTS/RTS pins to increase serial link reliability.
It should make log download speeds (and everything else) a little less sporadic. Also in your launch file for ROS/MAVROS you need to enable hardware flow control. I’m going to write some docs up on that over the weekend unless it is somewhere that I haven’t seen.