Hello guys,
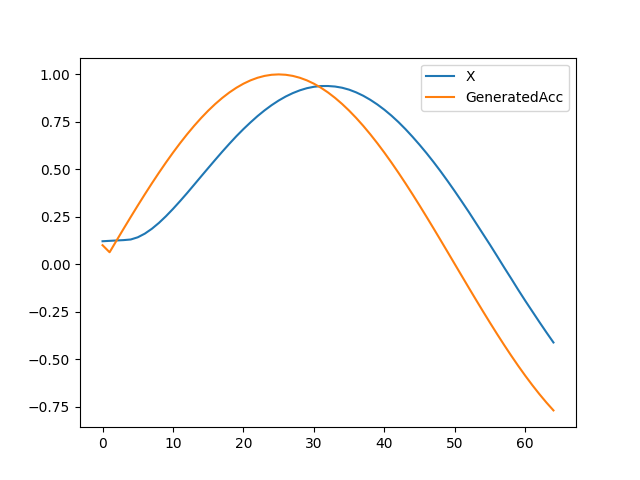
I am currently generation acceleration on iris model in Gazebo but when I plot the generated and measured acceleration on quad in Gazebo, I find that there is a delay, do you know the reason? The plot below shows the generated acceleration and measured on the quad in x direction.
P.S. I interfaced PX4 with ROS in Gazebo to check the sensor nodes.
Thanks for your help.
-Jelly