Dear Colleagues,
I would like to take some questions. I am a beginner in the APM universe.
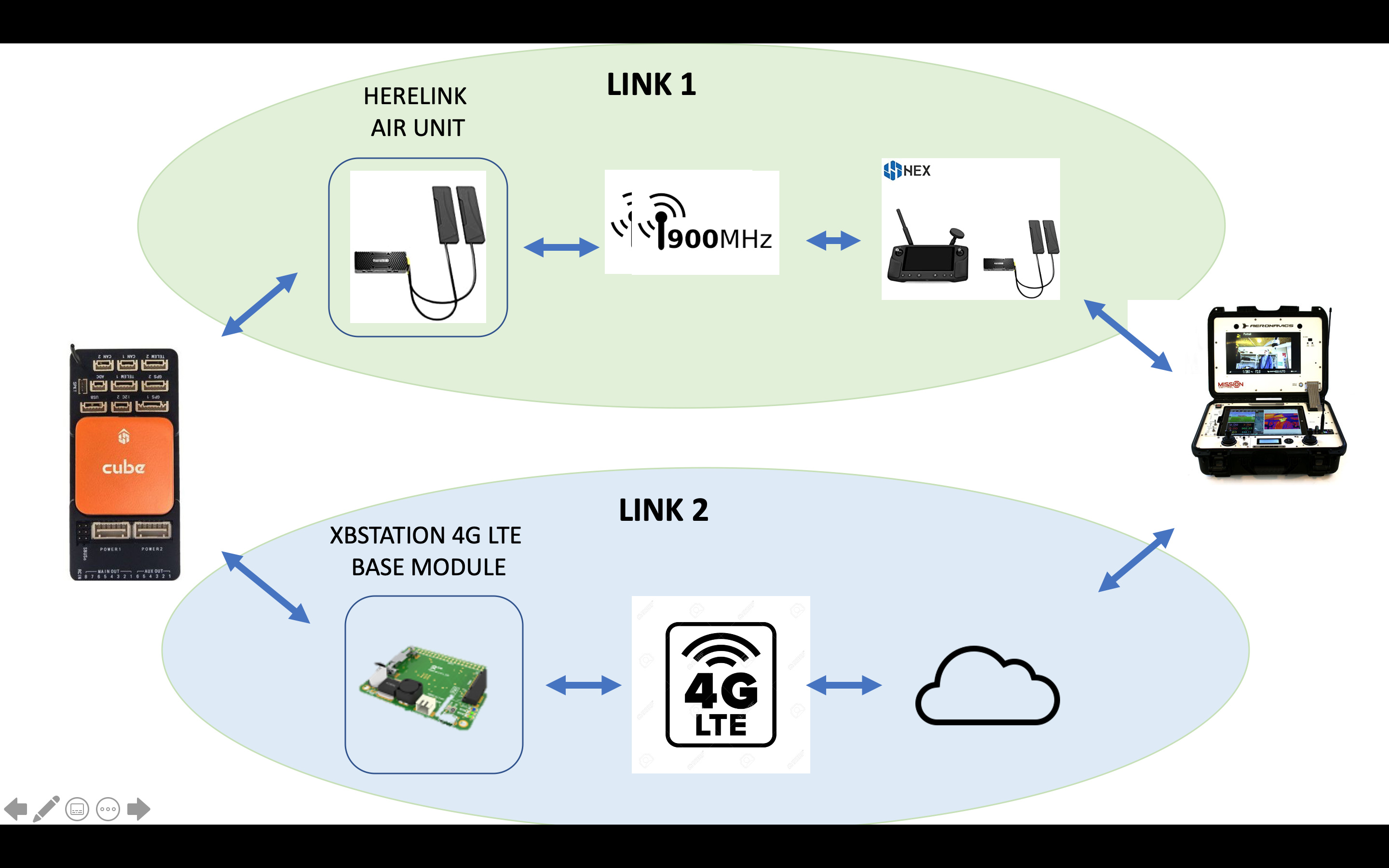
I am intending to implement a delivery system through drones and one of the problems I am encountering is the issue of communication.
I have some doubts and made a drawing to better describe my problem.
Doubts:
-
Does Pixhawk support two telemetry devices working at the same time? If so how would it work?
-
Is there a contingency mechanism when one of the communication links does not work? Does it point to the nearest telemetry? If so where do I find such information?
-
Can it do data integrity control between two telemetry at the same time as checksum?
I appreciate if anyone can help me
Best Regards
Fabio