Hi I am trying to control a brushed water pump with a brushed esc using qgroundcontrol and telemetry.
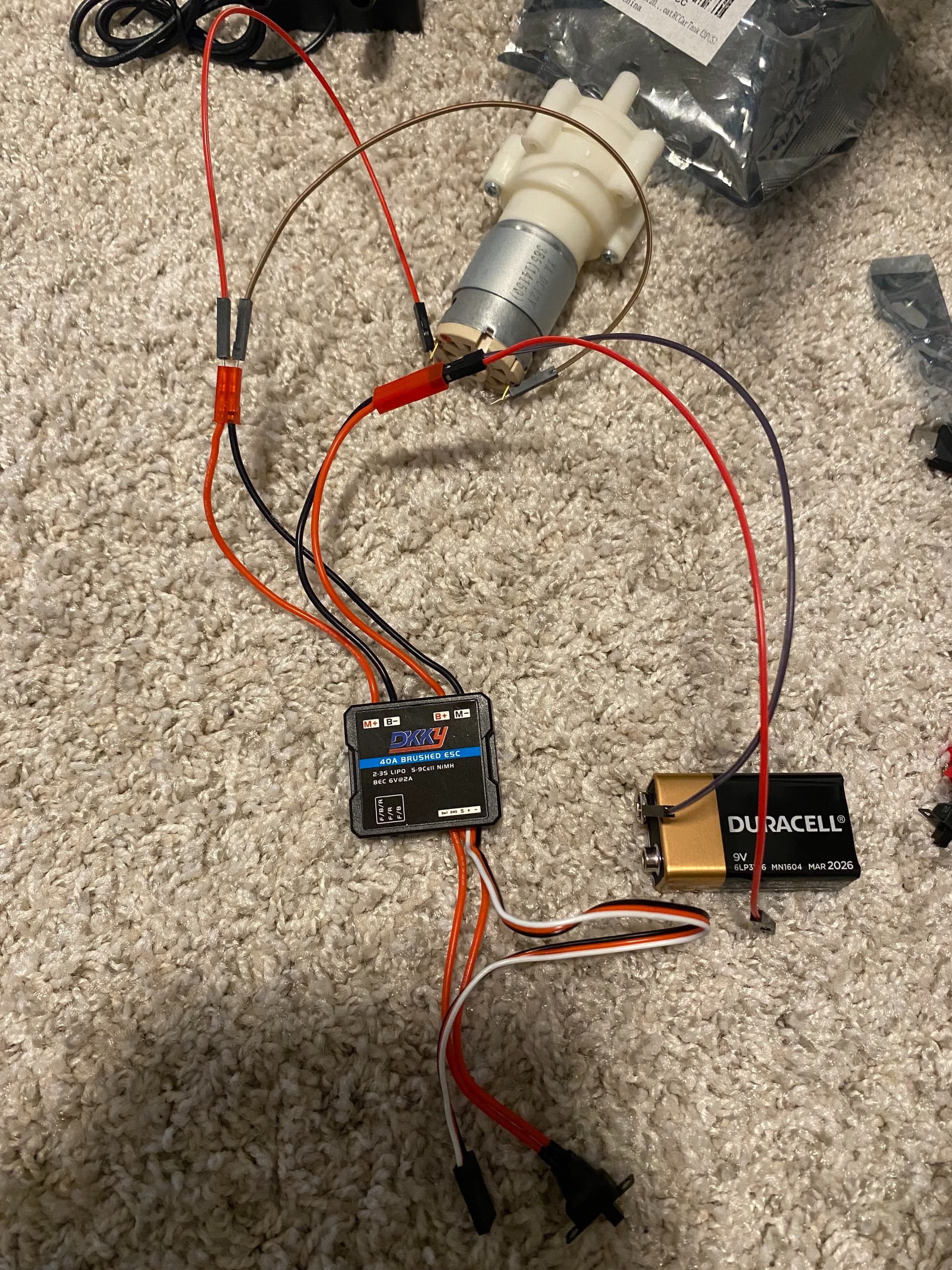
This is how I set up my esc and water pump.
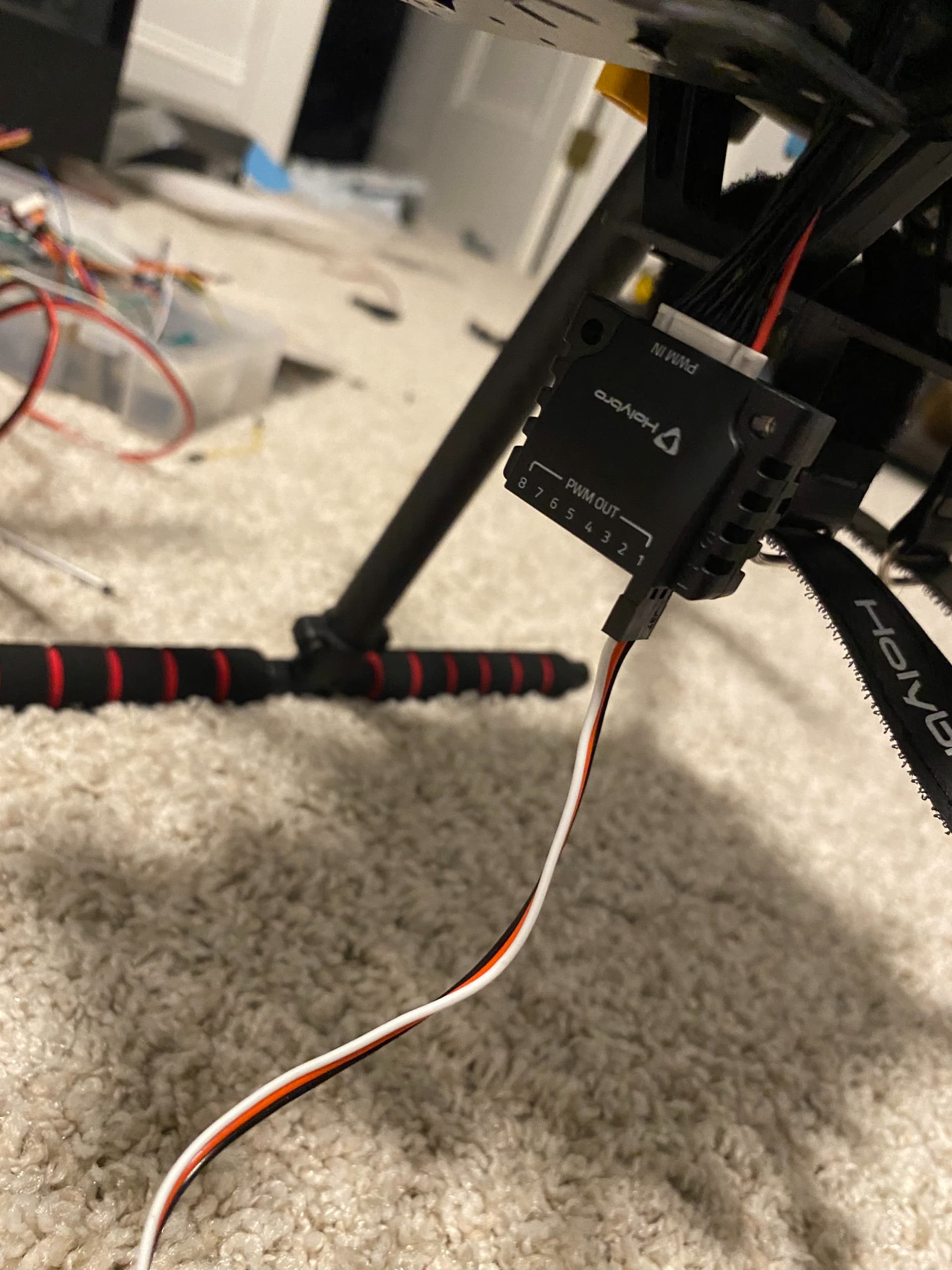
I connected this to the fmu pwm out breakout poard from the pixhawk 6c
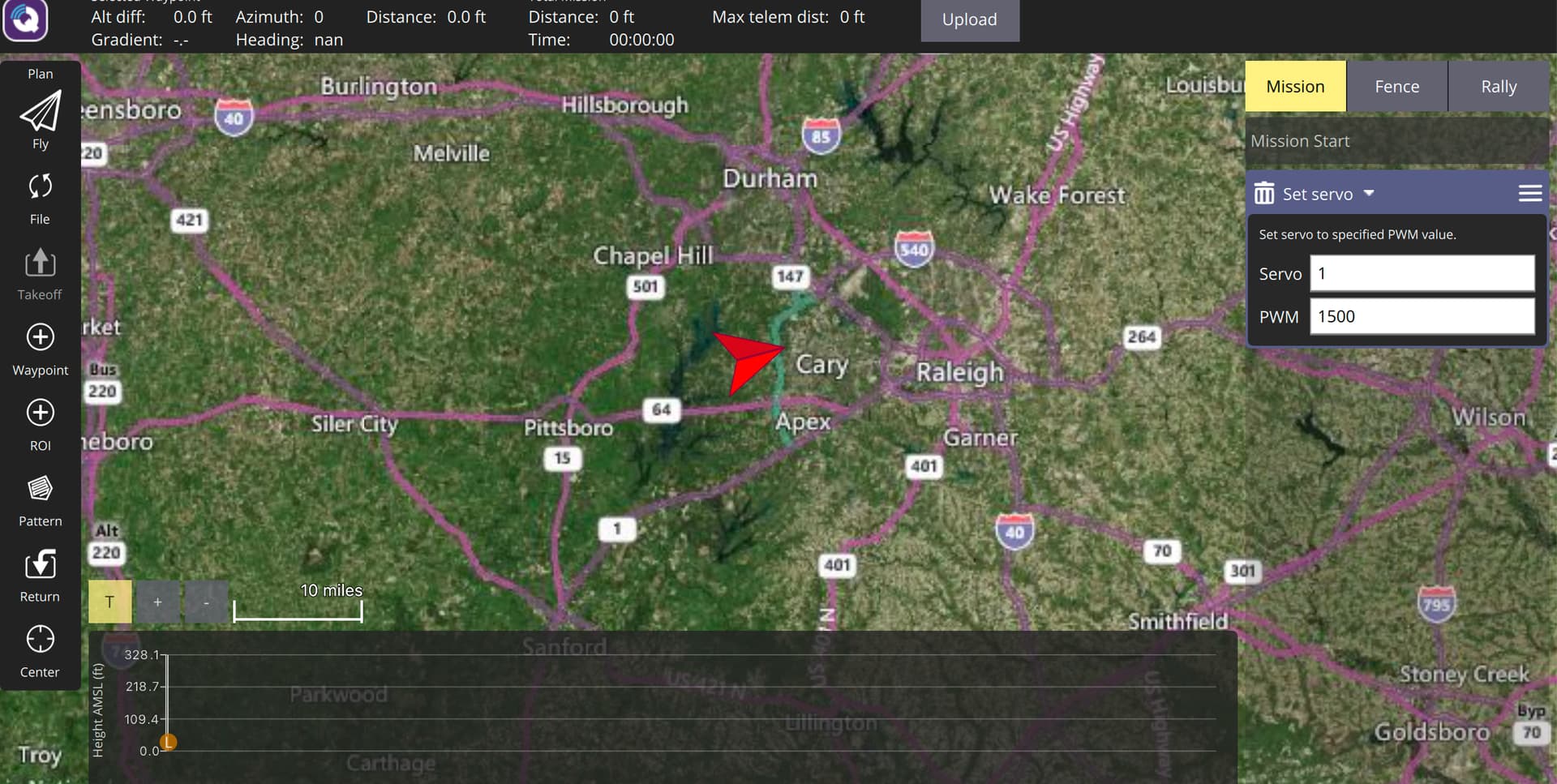
And this is the mission I set up in qground control
However this is not working. Is there anything I did wrong?
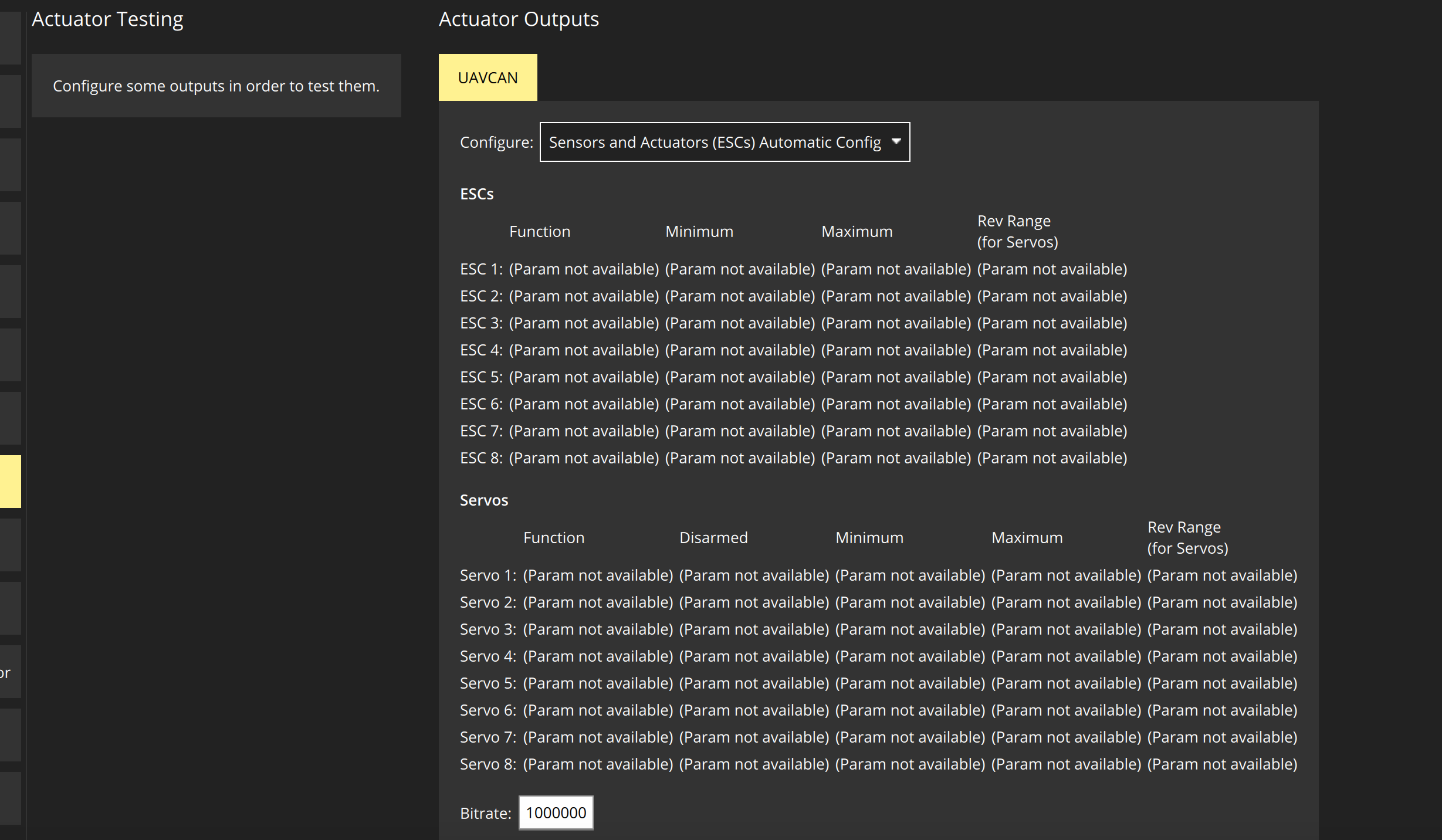
in the actuator tab you can configure rc passthrough for the servo. Does that work?
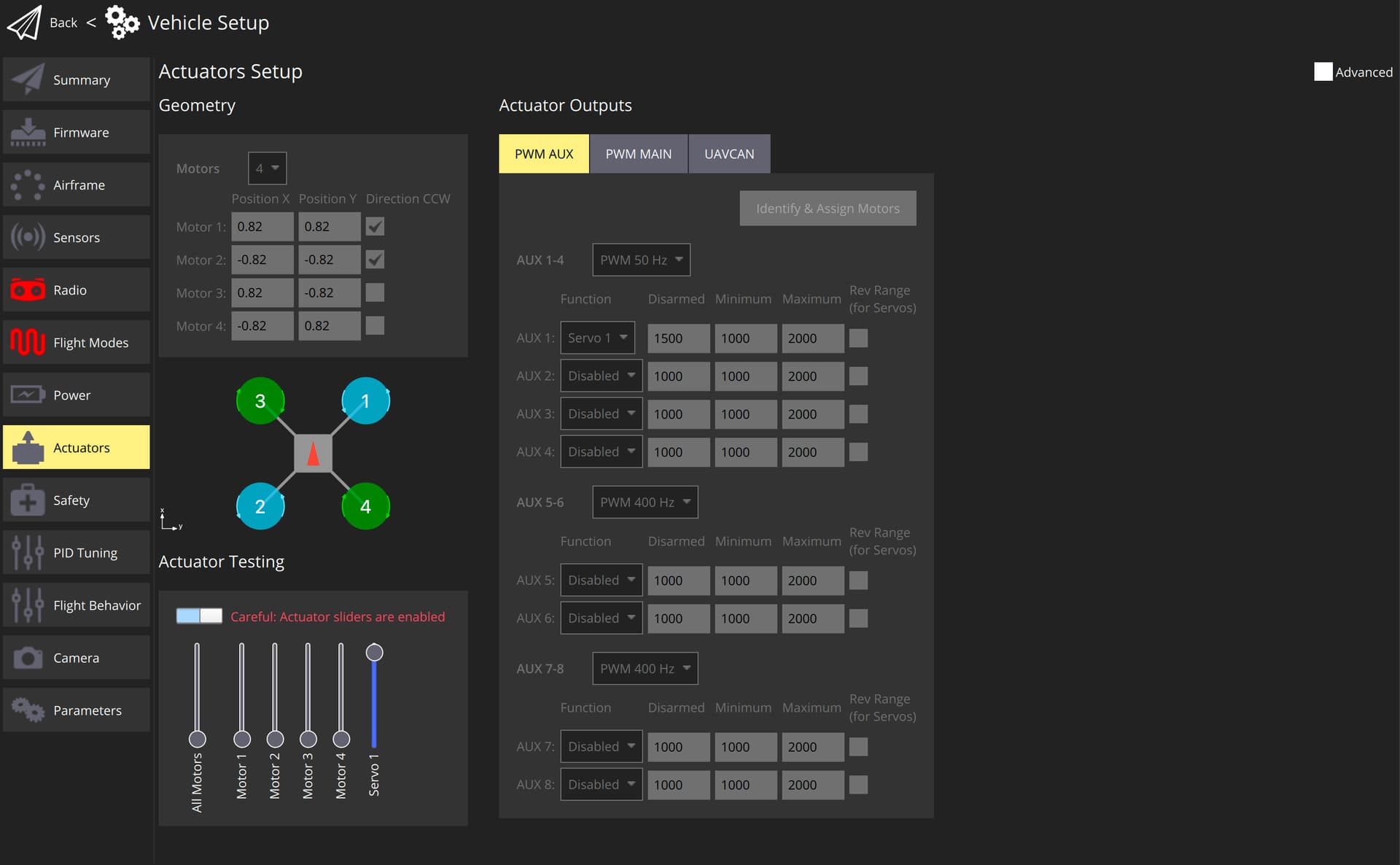
My setup had motors instead of actuators but once I set SYS_CTRL_ALLOC =1. This is what it looks like now.
By the way I am using the holybro x500 v2
thats odd. can you try updating to 1.14?
I tried this but I am still getting no movement from my pump
I got it working with a SG90 servo however