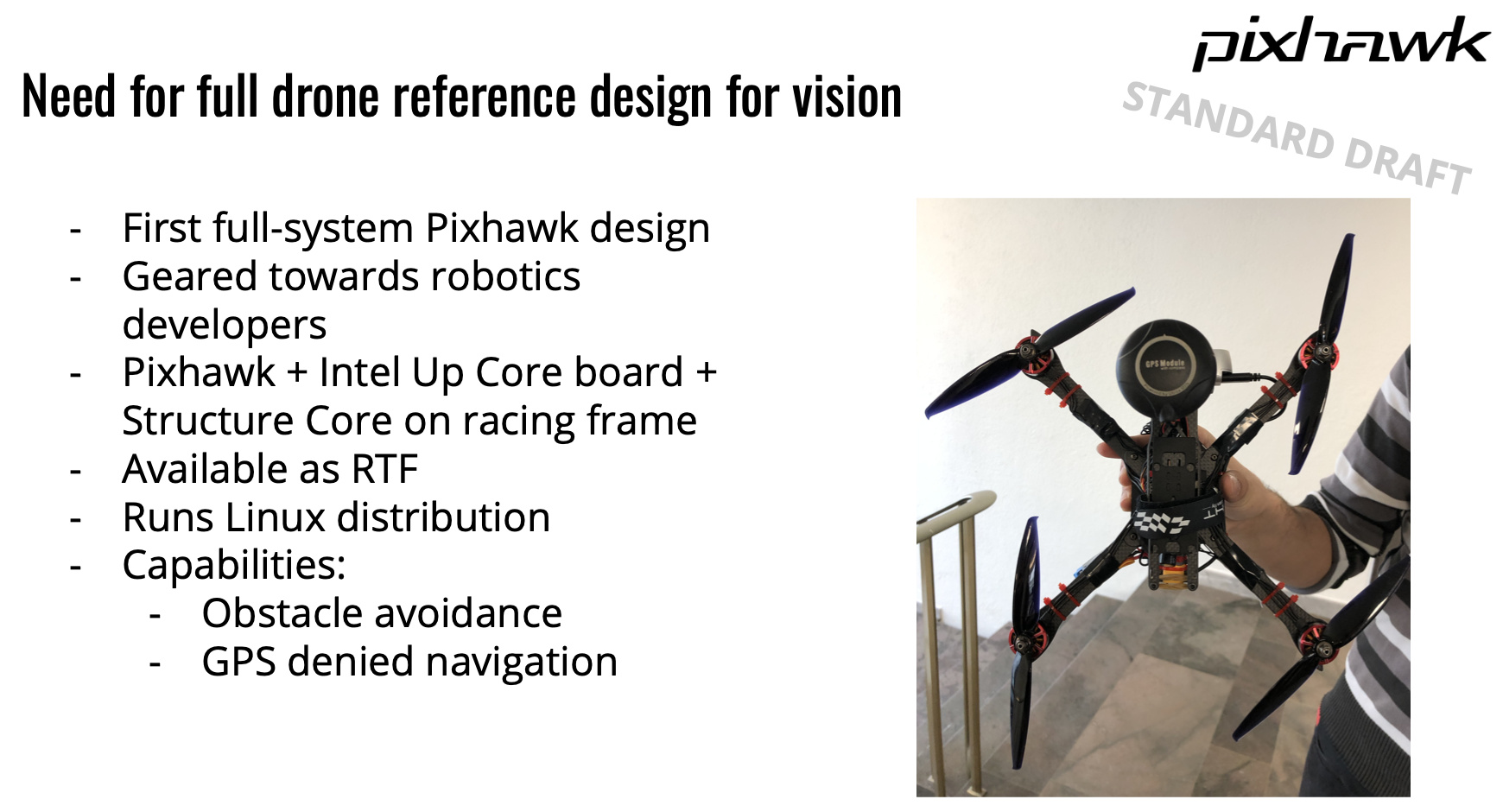
@jkflying It would be good to provide high-level updates here. We are working on a dev kit - a high level summary is here: