Hi! we did some test and wanted to share with the comunity since the results are quite confusing. We´d like to choose which is the best configuration (and hardware) based on this results:
Description:
stimulating with a magnet the two compasses (internal and external) we study the magnetic field variations depending on the priority settings.
we allways touch 3 times the external compass, and then, 3 times the internal one… allways i this exact order.
we test it with freefly gps/mag and with hollybro F9P (auterion) GPS/mag with the following results:
The results are a bit confusing, but we can extract some data:
It seems like the external sensor conditions the behavior of the internal one.
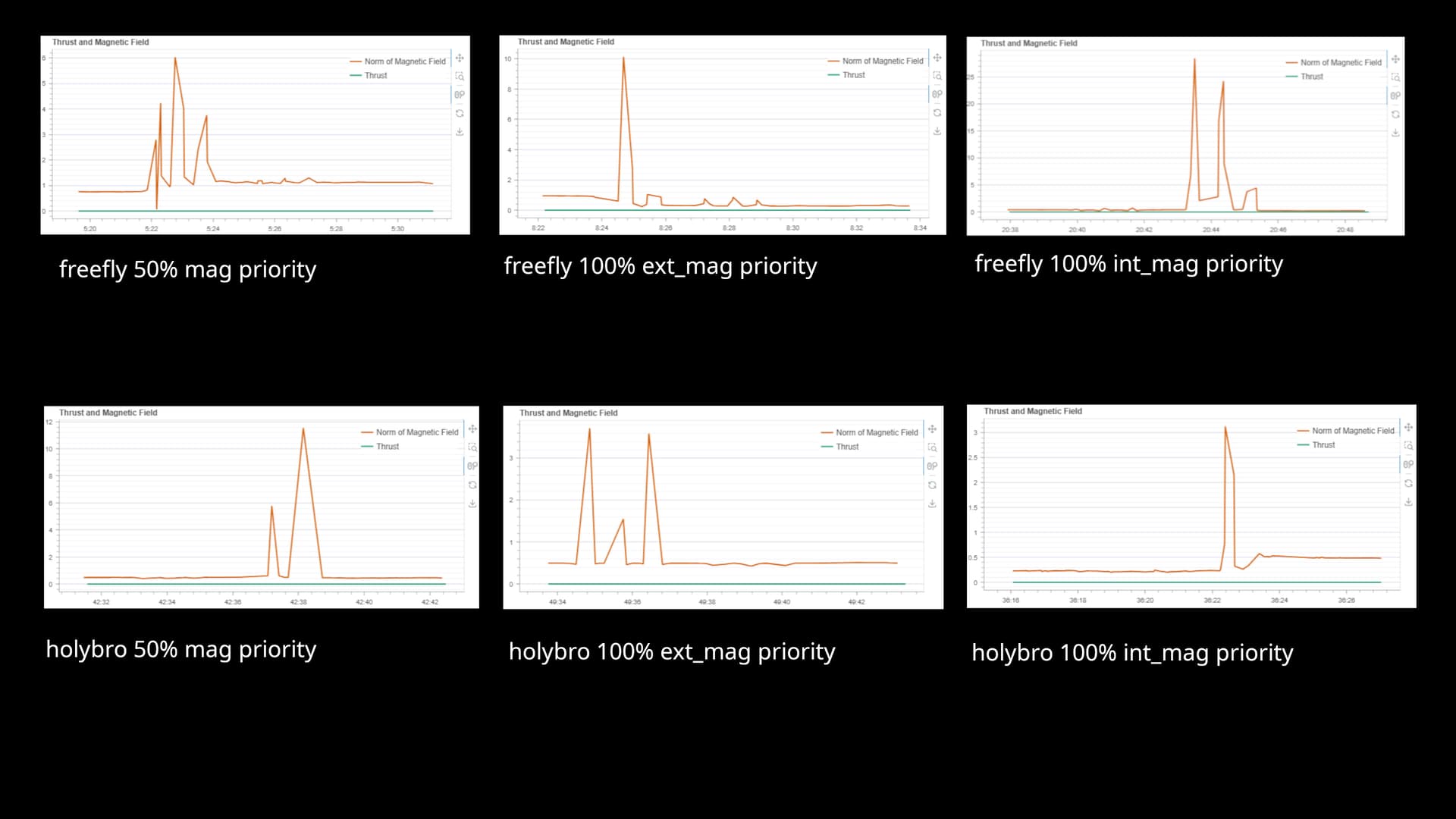
When priority is set to 50% we obserb different behavior.
Whith the freefly´s, the external sensor has priority over the internal (5u variations vs 0,2u). While with the holybro, is the opposite (internal varies 0,05u vs 11u variations in the internal)
When set to 100% external mag priority; it has the expected behavior, but magnitudes are different:
The freefly´s peak, is observed to 10u, while the holybro´s reaches just 3,5u, the internal one has also less magntude when setted with the holybro (0,05u vs 0,3u aprox with the freefly)
When set to 100% internal priority, we see the expected behavior, but again, the magnitude with the holybro, seems to be limmited for the internal:
The peak reaches 28u with the freefly, while just reaches 3.1u with the holybro.
We can just conclude that it seems like the Holybro gives an overall more atenuated signal. Magnetic field varies from 0 to 3.5u (except in 50% priority config)
I wait for your comments and conclussions if there´s one.
Thanks!