We have been getting a few requests to have our UAV “auto-yaw” to prevent collision with obstacles.
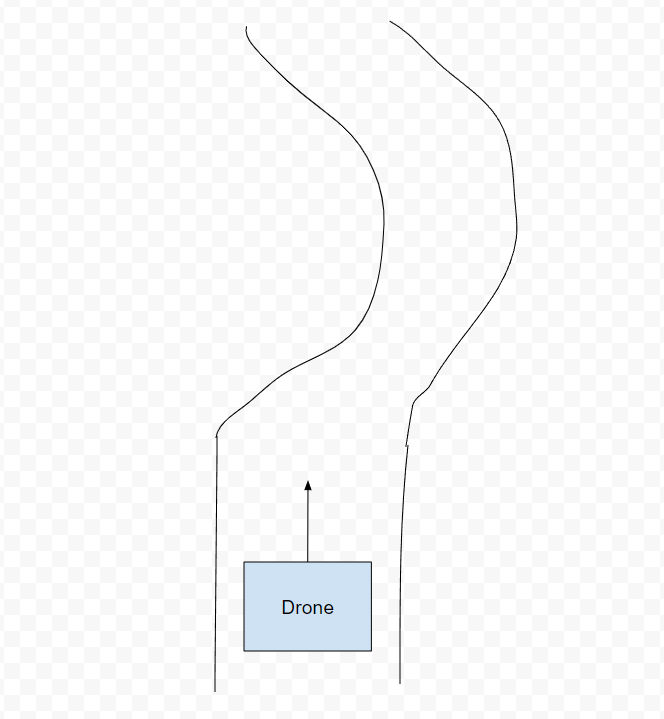
For example, let’s say we have a curved hallway, and our operator wants to fly straight down it. The operator should just move the stick forward and the drone will follow the wall around
We were thinking of doing this on the PX4 side. Has anyone thought to do this before, and if so are there any algorithms/research we can reference to implement this?